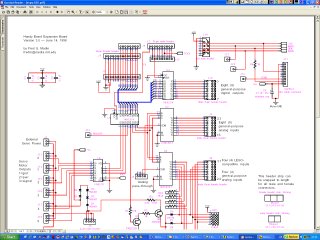
| Anschlusstechnik f³r die externen Komponenten des HandyBoards |
|
|
Letztmalig dran rumgefummelt: 26.01.12 17:52:05 |
|
|
GOLEM XX und (k)ein Ende in Sicht??? Nun - eines steht fest: es wird keinen weiteren GOLEM auf LEGO-Basis geben - wir haben dank der hervorragenden Mechaniker Tony und Florian eine statisch sehr gute Maschine und auch die elektrischen Komponenten sind diesmal wirklich stabil installiert. Es gab schon einmal eine sehr gute Maschine, deren technische Einzelheiten f³r Fans hier auch detailliert beschrieben werden. | |||||||||||||||
|
|
||||||||||||||||
| 0. Die Anschlussbelegungen des
Handy- sowie des Extensionboards 1. Die Spannungsversorgung 2. Das Sonar 3. Der Liniensensor 4. Die Radencoder 5. Infrarot-Sensoren 6. Der Kompass CMPS03 7. CMU-Cam 8. die rollenden Augen |
||||||||||||||||
|
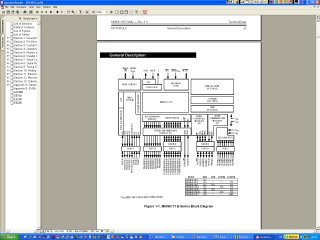
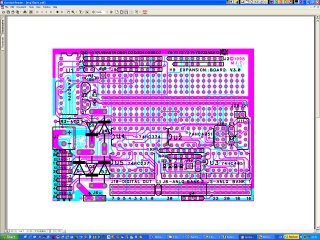
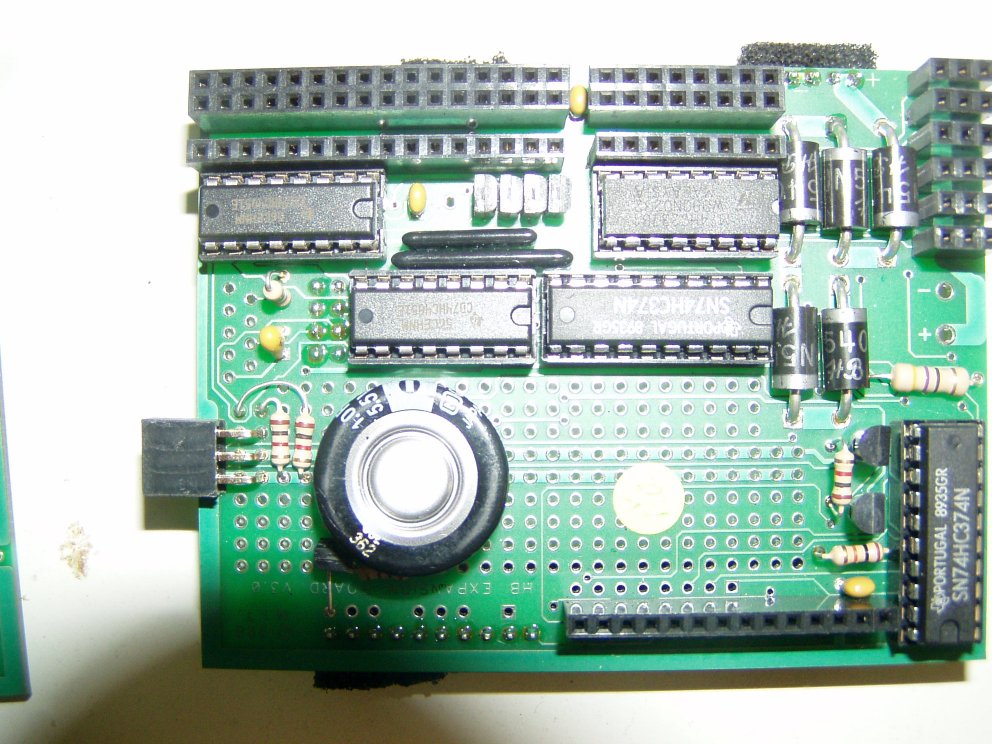
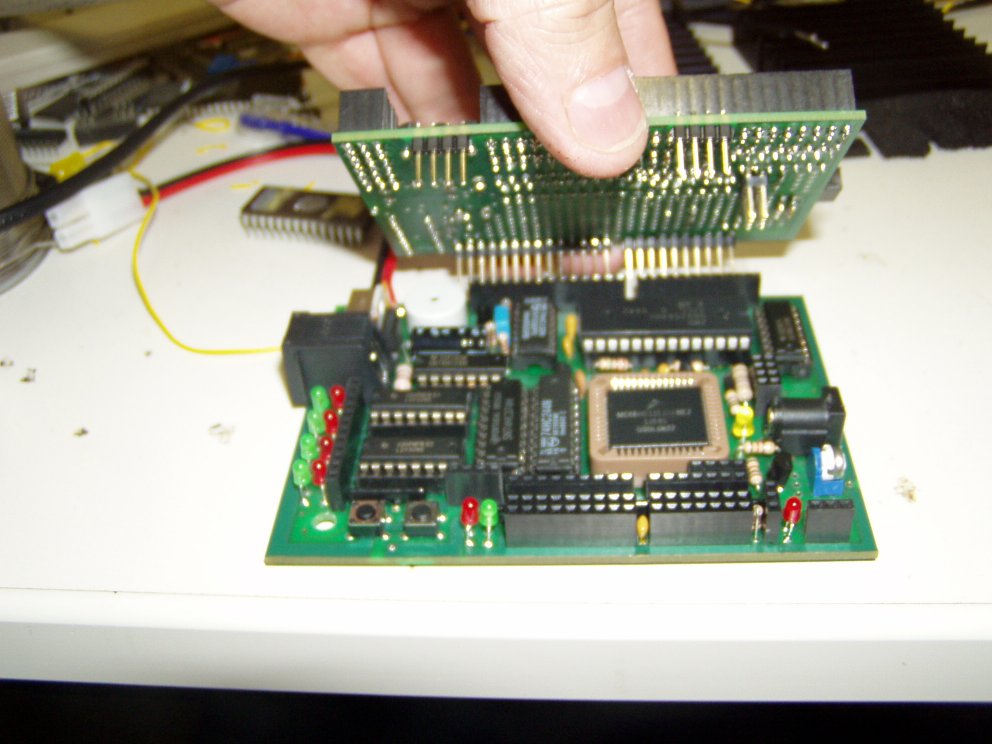
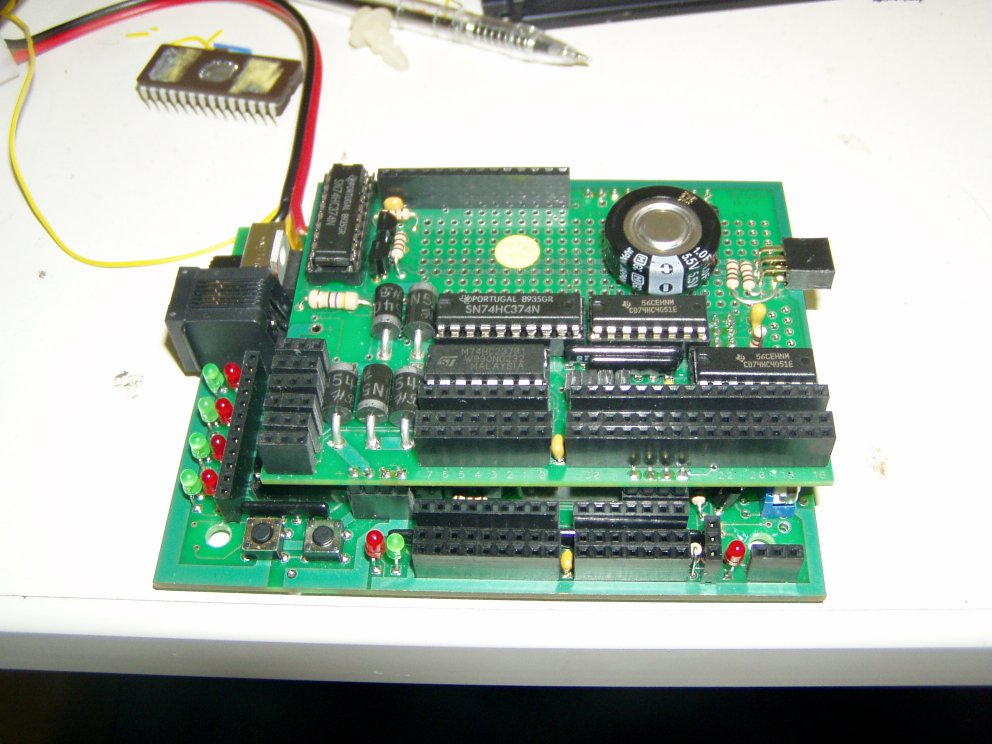
| 0. Die Anschlussbelegungen des Handy- sowie des Extensionboards |
|
|
|
|
|
Die Anschlussbelegungen der beiden Boards zu kennen und dann aus den Dokus der jeweiligen Komponenten die richtigen steuersignale herauszulesen, ist die halbe Miete zumindest f³r die elektronische Seite des Roboters. Da wir da jedes Jahr machen mussten (und wohl auch weiterhin m³ssen), soll das nunmehr etwas konstant zusammengetragen werden. | |||||||||||||||||||||
|
||||||||||||||||||||||
| 1. Die Spannungsversorgung ... |
|
|
|
|
|
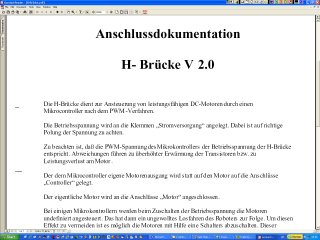
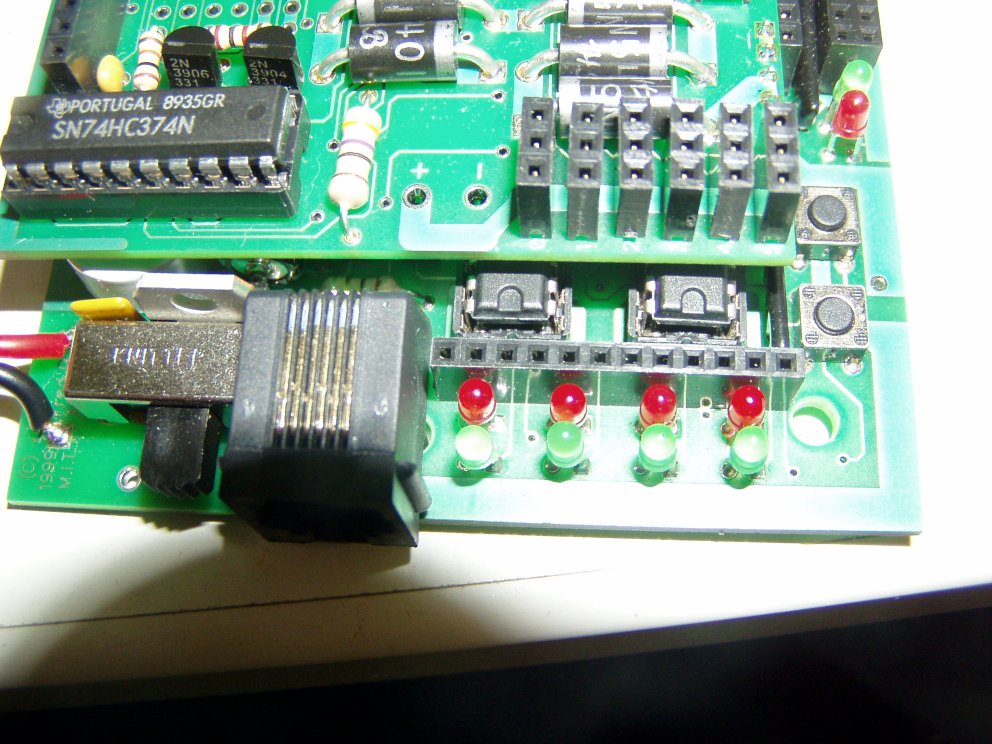
Die Stromversorgung ist in mehrere Strecken unterteilt und alle Strecken sind ³ber Relais-Selbsthalteschaltungen gesteuert. Alle Signale werden mit dem EIN-Taster gemeinsam zugeschalten und ³ber den AUS-Taster wieder weggenommen. | ||
|
| 2. Sonaranschl³sse |
|
|
|
|
|
In Erfurt haben wir als
Frischlinge nat³rlich sofort mitbekommen, was wir alles falsch gemacht haben
(ein gleich vorweg: eigentlich fast alles). Messen, messen und nochmals
wichtig. Es n³tzt gar nix, mit 30 und mehr Sensoren fahren zu wollen, wenn
diese nicht richtig funktionieren. Deshalb im folgenden nun die technischen
Details unserer Sensortechnik sowie Steuerungseinheiten. In den folgenden Beschreibungen verfolgen wir nicht das Ziel, einem Laien zu erklõren, wie Sensorik und Aktorik funktionieren und via Software miteinender abgestimmt werden m³ssen. Eigentlich belegen wir nur, dass wir's kapiert haben (das ist ja eines der heimlichen Ziele des Roboking-Wettbewerbs). |
||
|
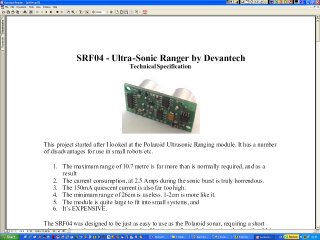
Ultraschall-Sonar
|
|||
| Der Ultraschallsensor ... ... misst den Abstand zu einem Hindernis - dies allerdings innerhalb eines relativ gro▀en Erfassungskegels, was ung³nstig ist |
|||
| Betriebsspannung: 5V | |||
| Anschlussbezeichnungen: Basiplatine Pin7 Digiports Echopulse oder Basiplatine Pin 9 Digiports; Expansionboard digitaler Ausgang 0 Triggerpulse-Eingang | |||
|
Abbildungen:
|
|||
Fotos:
|
| 3. Der Liniensensor ... |
|
|
|
|
|
... ist in der Lage, eine vorgegebene Linie abzufahren. Wurde einmal durch die optischen Reflexkoppler ein Farbunterschied gefunden, so kann dieser durch mehrere solcher Koppler ³berwacht werden - dies nach dem Motto: wenn er einen Koppler verlassen hat, muss er in einen anderen Koppler einlaufen. Das lõsst sich programmtechnisch auswerten. | ||
|
Line Sensor mit I2C-BUS
|
|||
|
|||
| Betriebsspannung: 5V | |||
| Anschlussbezeichnungen: I2C-BUS am Expansion-Board | |||
| Abbildungen: |
| 4. Die Radencoder |
|
|
|
|
|
Alle sind im Winterurlaub - aber auch wirklich alle! Wirklich alle??? NEIN - ein kleines Team v÷llig Bescheuerter ist lokal verblieben und hat sich vorgenommen, des Roboter GOLEM in die Version 2.01a zu ³berf³hren - und genau diese prõsentieren wir nun hier und jetzt: |
| Betriebsspannung: 5V | |
| Anschlussbezeichnungen: Basiplatine Pin7, 12 Digiports und 8, 13 Digiports Rechts- Linkslauf | |
| Abbildungen: | |
|
|
| 5. Die Infrarotsensoren |
|
|
|
|
|
Alle sind im Winterurlaub - aber auch wirklich alle! Wirklich alle??? NEIN - ein kleines Team v÷llig Bescheuerter ist lokal verblieben und hat sich vorgenommen, des Roboter GOLEM in die Version 2.01a zu ³berf³hren - und genau diese prõsentieren wir nun hier und jetzt: | ||
| Betriebsspannung: 5V Expansionboard Plus-Reihe 24 bis 27 sowie Minus-Reihe 24 bis 27 | |||
| Anschlussbezeichnungen: Expansionboard analoge Eingõnge 24 bis 27 Reflex-Eingõnge | |||
| Abbildungen:
|
|||
Fotos:
|
| 6. Der Kompass CMPS03 |
|
|
|
|
|
Alle sind im Winterurlaub - aber auch wirklich alle! Wirklich alle??? NEIN - ein kleines Team v÷llig Bescheuerter ist lokal verblieben und hat sich vorgenommen, des Roboter GOLEM in die Version 2.01a zu ³berf³hren - und genau diese prõsentieren wir nun hier und jetzt: |
| Die rollenden Augen ... ... sind ein rein
elektronischer Gag, der auch 'ne Menge Strom zieht - sie sind deshalb
abschaltbar
|
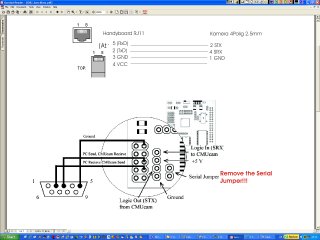
| 7. Die CMU-Cam |
|
|
|
|
|
Alle sind im Winterurlaub - aber auch wirklich alle! Wirklich alle??? NEIN - ein kleines Team v÷llig Bescheuerter ist lokal verblieben und hat sich vorgenommen, des Roboter GOLEM in die Version 2.01a zu ³berf³hren - und genau diese prõsentieren wir nun hier und jetzt: |
| Der Ultraschallsensoren ... ... misst den Abstand zu einem Hindernis - dies allerdings innerhalb eines relativ gro▀en Erfassungskegels, was ung³nstig ist |
|
| Die Infrarotsensoren ... ... arbeiten eng mit dem Ultraschallsensor zusammen |
|
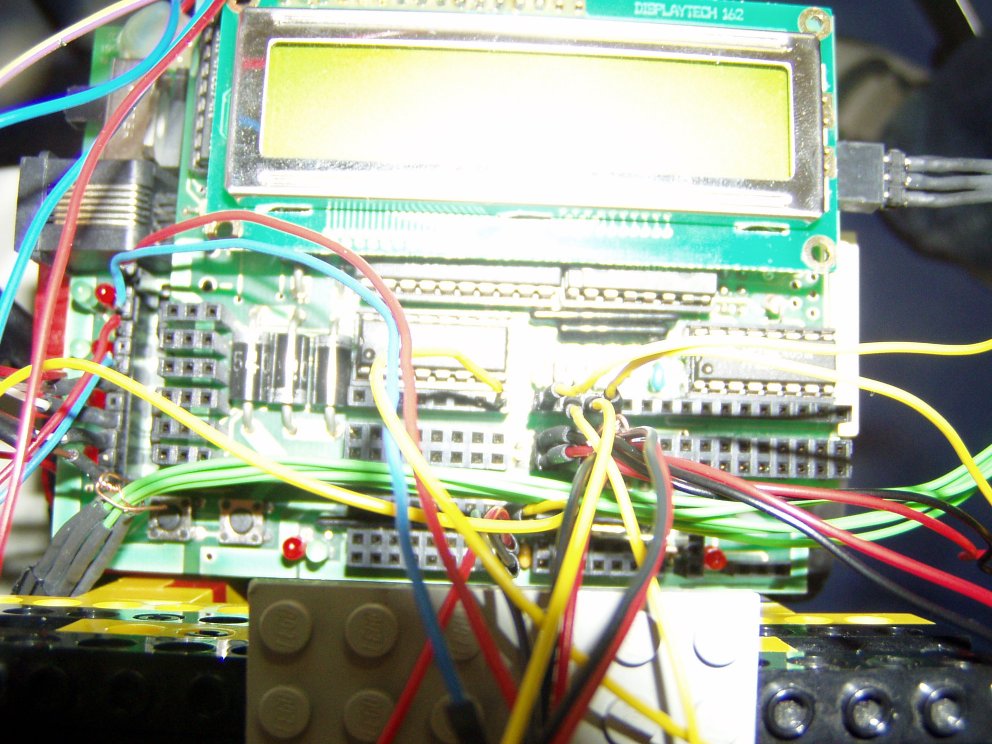
| Die Namenszug im Sechzehnsegment-Display ... ... ist eine Multiplexerschaltung bezogen auf die anzuzeigenden Digits (Stellen) |
|
| 8. Die rollenden Augen |
|
|
|
|
|
Alle sind im Winterurlaub - aber auch wirklich alle! Wirklich alle??? NEIN - ein kleines Team v÷llig Bescheuerter ist lokal verblieben und hat sich vorgenommen, des Roboter GOLEM in die Version 2.01a zu ³berf³hren - und genau diese prõsentieren wir nun hier und jetzt: |
| Die rollenden Augen ... ... sind ein rein
elektronischer Gag, der auch 'ne Menge Strom zieht - sie sind deshalb
abschaltbar
|
| 9. Verwandte Themen |
|
|
|
|
|
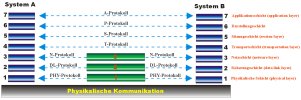
Da unsere Roboter ganz furchtbar viel mit Elektronik, Stromversorgung, Logik, Sensorik, Aktorik und Signalwandlung, aber auch mit Microcontrollern sowie deren Programmierung zu tun haben, k÷nnen wir hier nun rein theoretisch auf fast jeden Bereich der Informatik verlinken und werden garantiert f³ndig. Selbst einen Daten³bertragung via Schnittstellen ist erforderlich. |
||||||
Bereich Stromversorgung |
|||||||
Bereich elektronische Bauelemente |
|||||||
Bereich Mikroprozessor-Technik |
|||||||
Bereich Logik |
|||||||
Bereich Microcomputer und Microcontroller |
|||||||
Bereich Programmierung |
|||||||
Bereich Robotertechnik |
|||||||
Bereich Datenkommunikation |
|||||||
|
|
Bereich Rechentechnik und Betriebssysteme |
|
zur Hauptseite |
® Samuel-von-Pufendorf-Gymnasium Fl÷ha | ® Frank Rost im November 2007 |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) äDieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei äfō!ō Diddi Hallervorden, dt. Komiker und Kabarettist |
|
Diese Seite wurde ohne Zusatz irgendwelcher Konversationsstoffe erstellt ;-) |







{kind=link}
{kind=link}
{kind=link}
{kind=link}