| GOLEM II des Teams "Rabbi Loew" - nach dem sagenumwobenen "Vater" des Golems zu Prag |
|
|
Letztmalig dran rumgefummelt: 03.11.07 12:25:50 |
|
|
GOLEM II und (k)ein Ende in Sicht??? Nun - eines steht fest: es wird einen GOLEM III geben - eben nach dem GOLEM II. Dieser aber soll nun das Rennen wõhrend der C-Bit vom 10.3. bis 12.3.06 in Hannover bestreiten. Es gibt eine vollkommen neue Maschine, deren technische Einzelheiten f³r Fans unter 2. auch detailliert beschrieben werden. |
|
|
|
| 1. Der neue GOLEM im
technischen Kurzportrait 2. Technische Grundlagen des GOLEM II 3. Foto-Dokumentation der Entwicklung des GOLEM II ;-) 4. Vorbereitung Hannover 2006 5. Arbeitsberichte und Foto-Galerie Hannover 2006 ab 20.3.06 ;-) |
|
Teilnehmer:
Betereuer: |
|
| wie wir mit GOLEM I angefangen haben, kann man hier finden | |
| GOLEM II auf der C-Bit 2006 |
| 1. Der neue GOLEM II im Kurzportrait |
|
|
|
|
|
Unsere AG hat sich im Mai 2005 gegr³ndet. Das Ziel ist die mehr oder weniger erfolgreiche Teilnahme am Robo-King- Wettbewerb, welcher von der TU-Chemnitz ins Leben gerufen und jõhrlich ausgetragen wird. Basis des GOLEM II war die Nummer eins - die es so leider nicht mehr gibt. |
| Projekt "Rabbi Loew" - so der vorlõufige Arbeitsname, bis wir evtl. etwas besseres gefunden haben - oder aber: der Name bleibt! Anmerkung mit Stand Oktober 2005: der Name bleibt!!! | |
Arbeitsfelder mit Schwerpunktcharakter sind:
Das trifft man nat³rlich nicht alles auf ein mal und sofort an, aber irgend wann wirst Du f³r eine Firma die Zeichnung Deiner Gedanken entwickeln und wirst evtl. unter Schmerzen das Prinzip der Eindeutigkeit sowie Verbindlichkeit von Aussagen in der Wirtschaft erlernen m³ssen. Genau das machen wir hier schon mal ;-) |
|
|
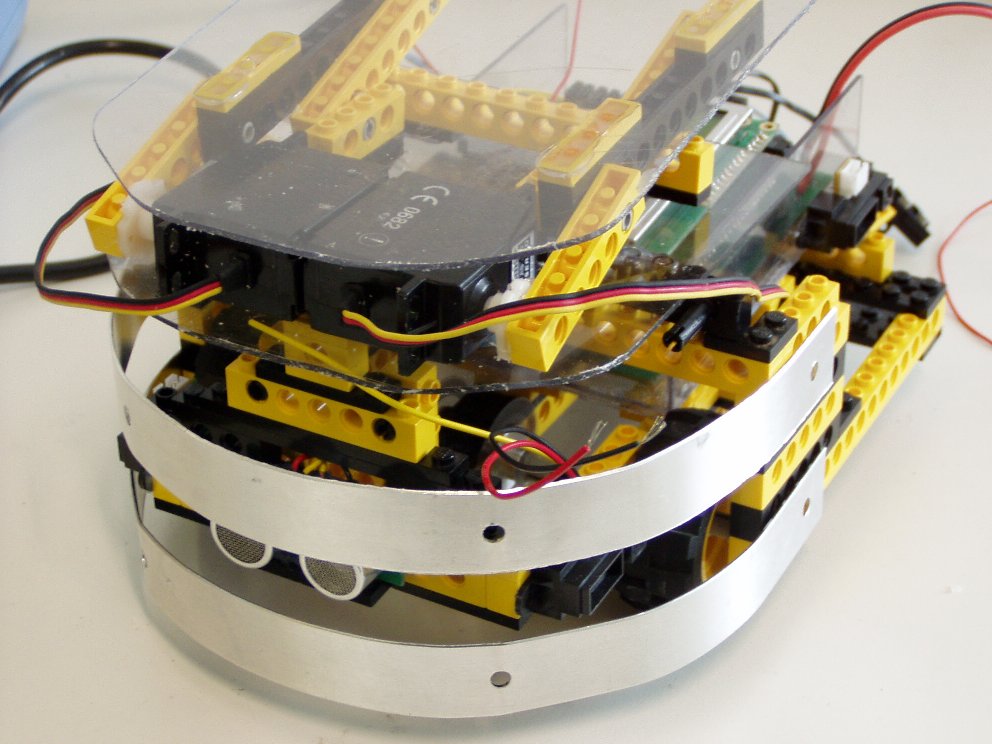
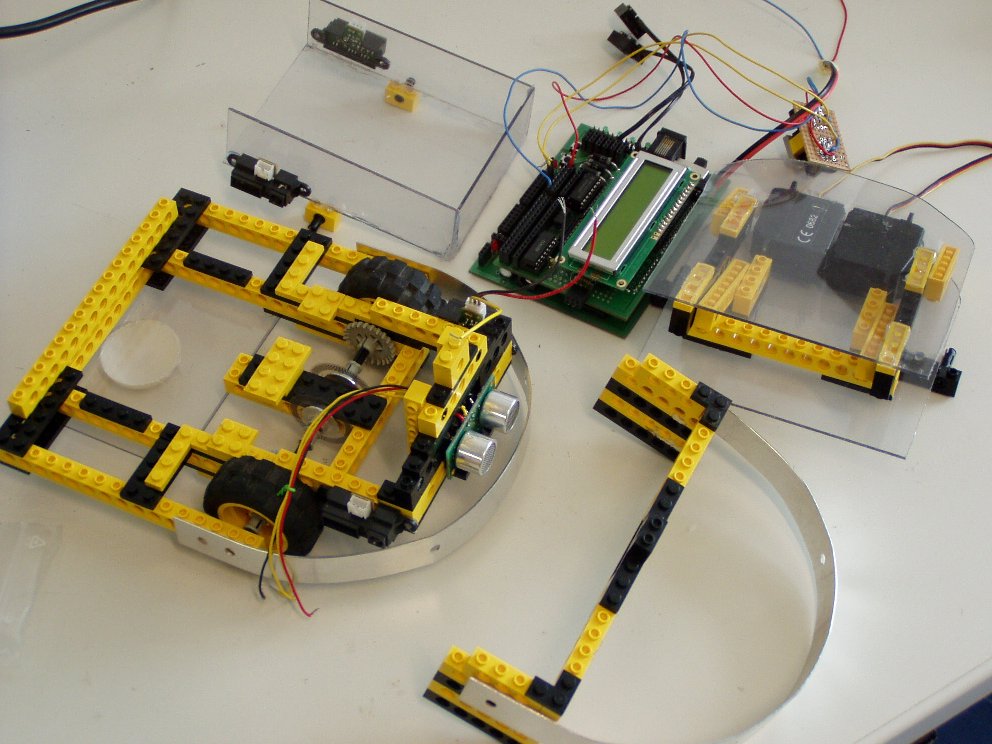
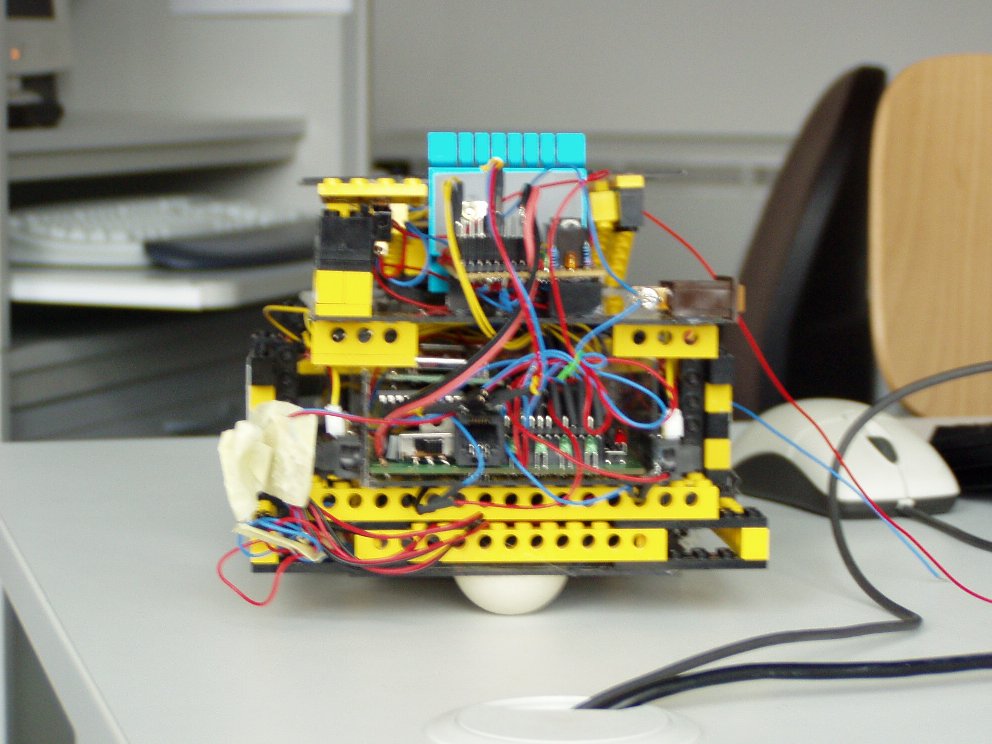
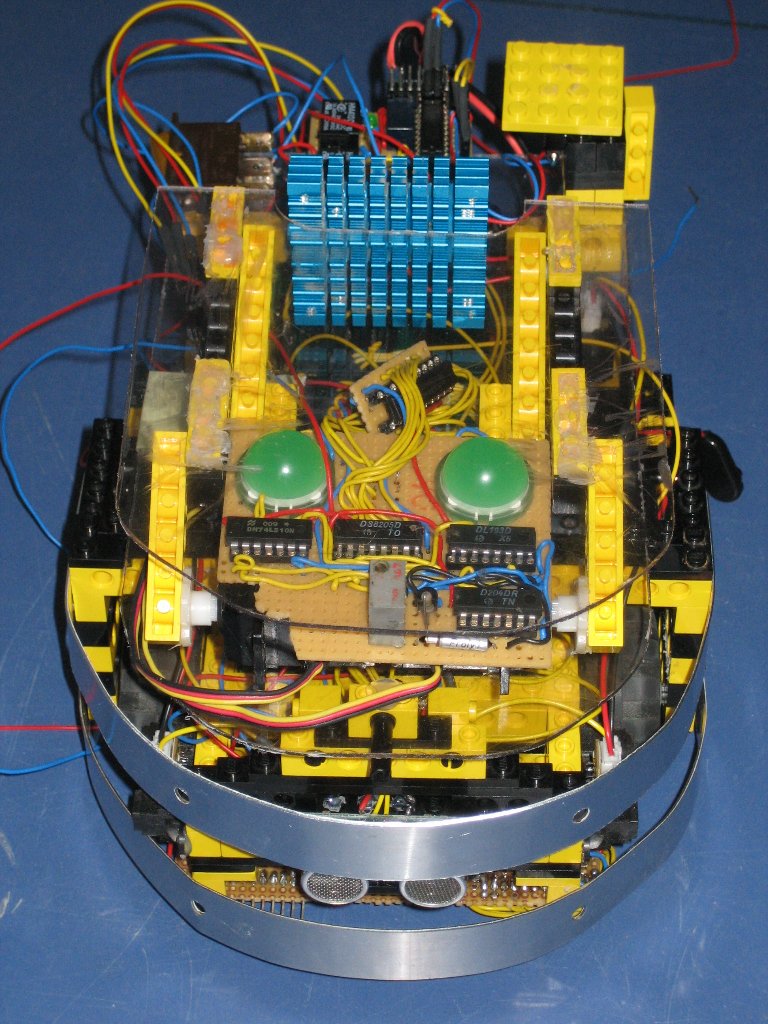
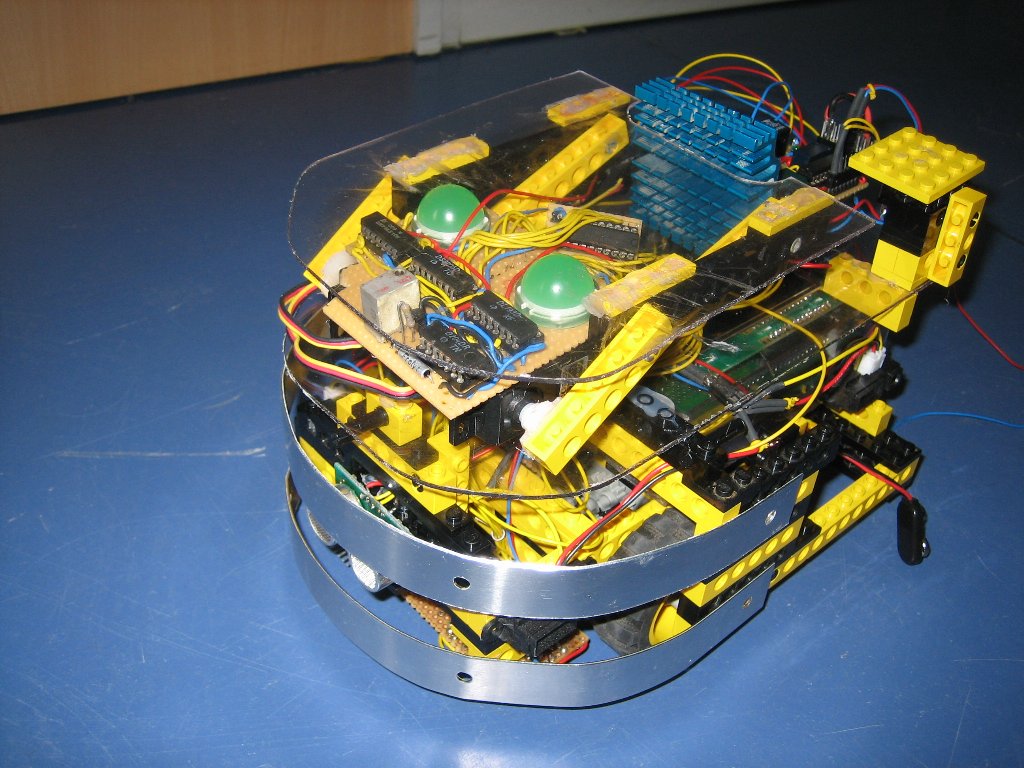
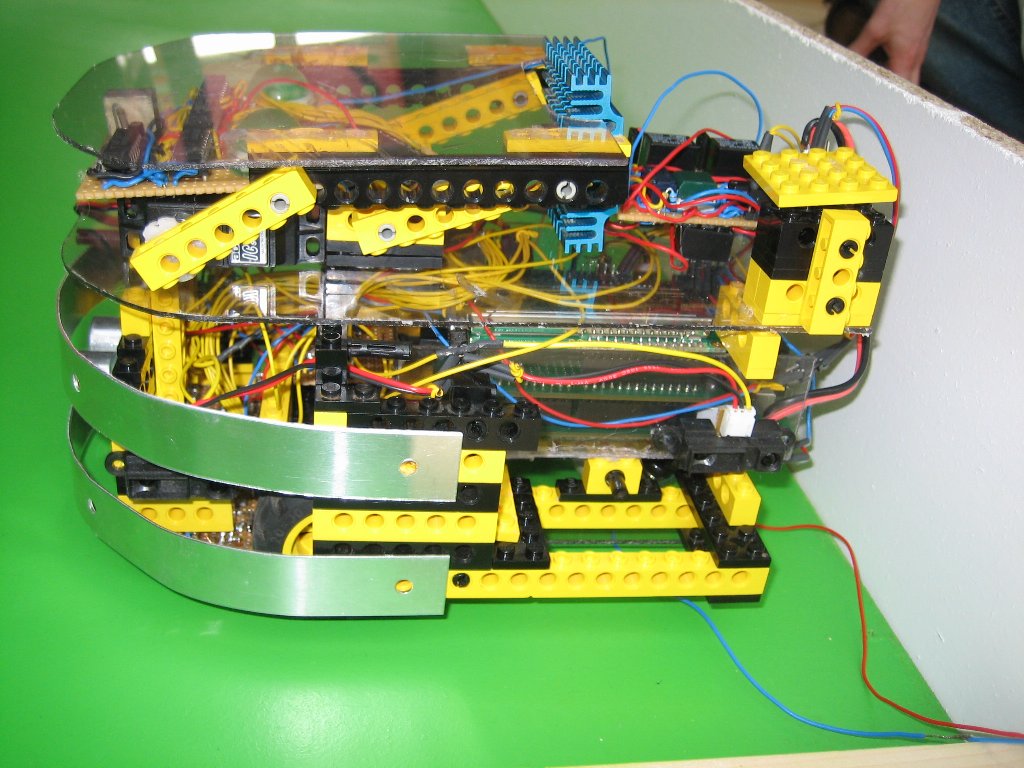
| 2. Technische Grundlagen des GOLEM II |
|
|
|
|
|
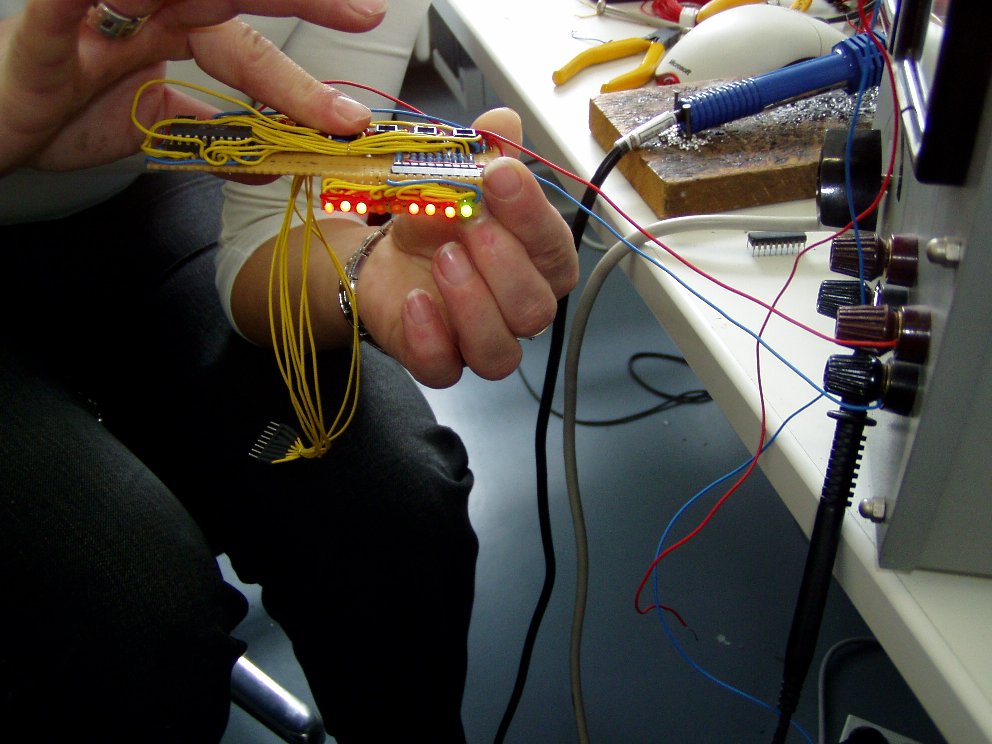
In Erfurt haben wir als
Frischlinge nat³rlich sofort mitbekommen, was wir alles falsch gemacht haben
(ein gleich vorweg: eigentlich fast alles). Messen, messen und nochmals
wichtig. Es n³tzt gar nix, mit 30 und mehr Sensoren fahren zu wollen, wenn
diese nicht richtig funktionieren. Deshalb im folgenden nun die technischen
Details unserer Sensortechnik sowie Steuerungseinheiten. In den folgenden Beschreibungen verfolgen wir nicht das Ziel, einem Laien zu erklõren, wie Sensorik und Aktorik funktionieren und via Software miteinender abgestimmt werden m³ssen. Eigentlich belegen wir nur, dass wir's kapiert haben (das ist ja eines der heimlichen Ziele des Roboking-Wettbewerbs). |
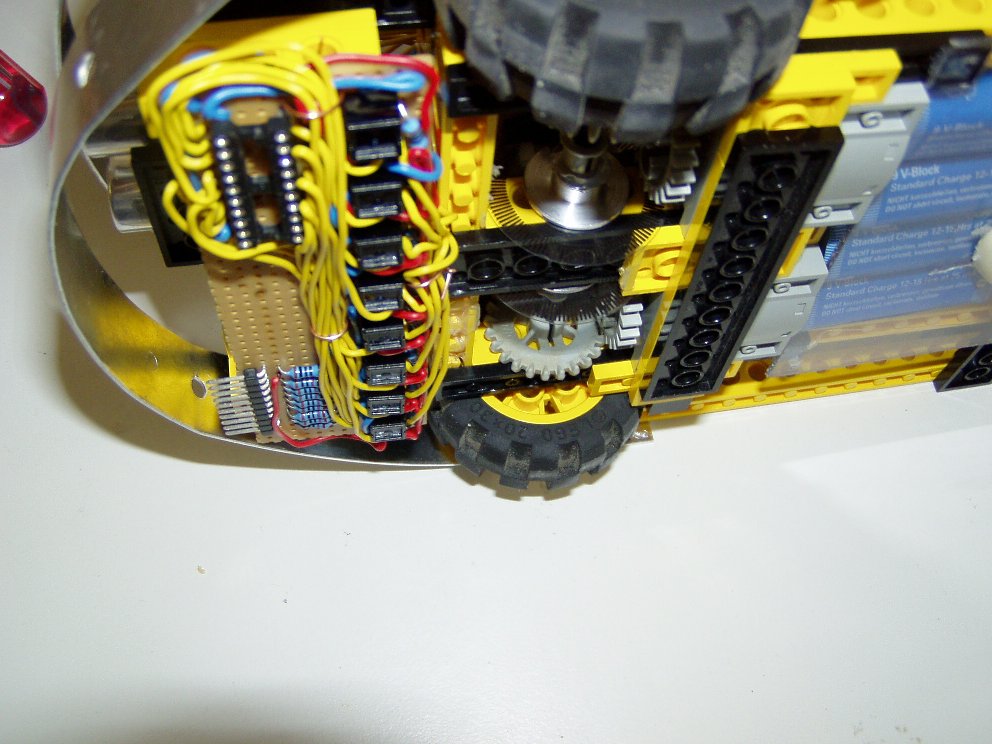
||
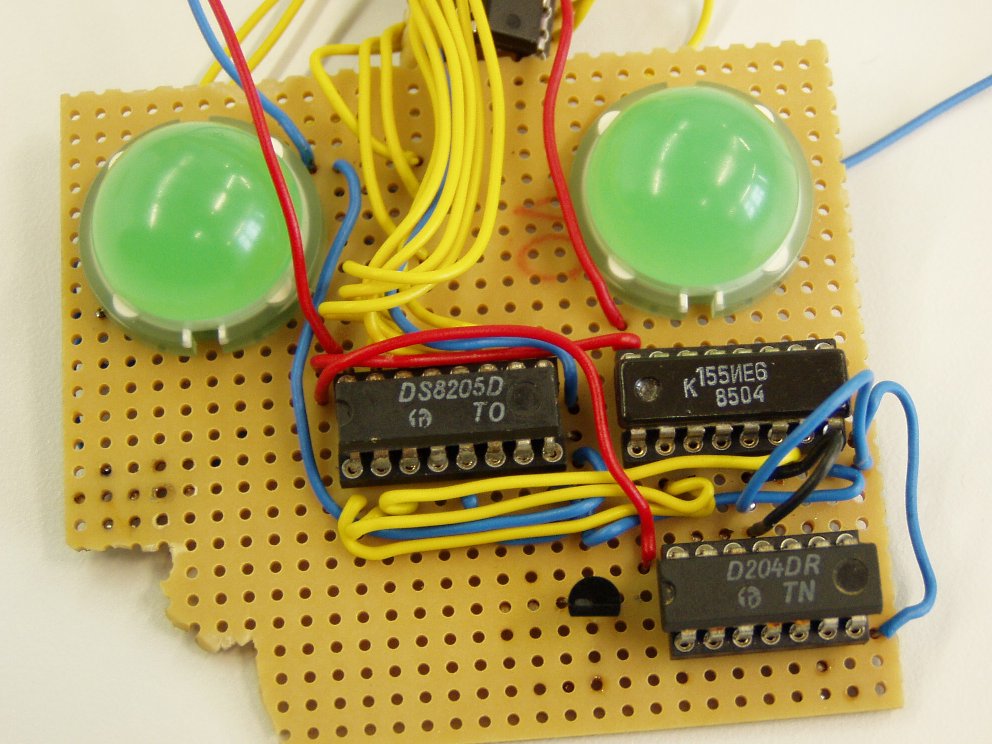
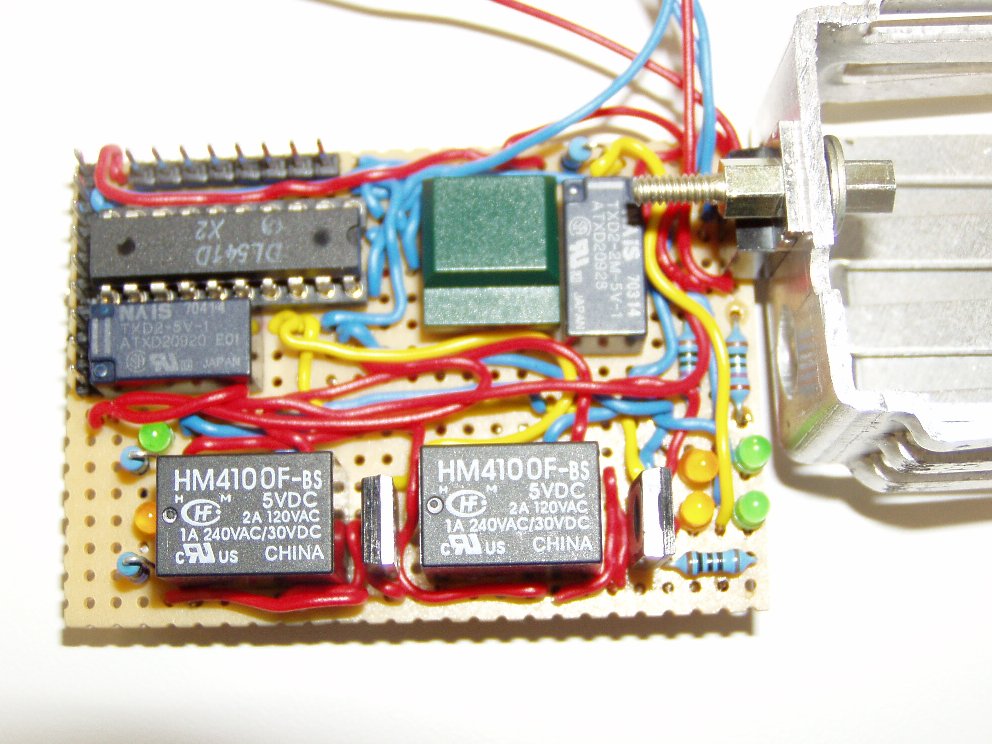
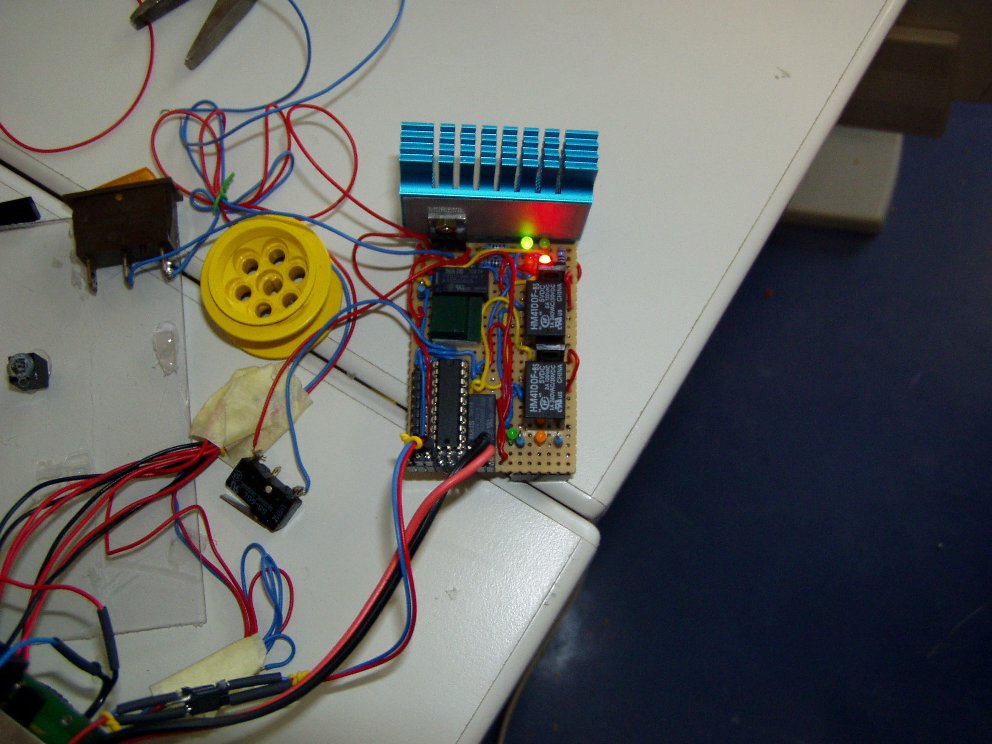
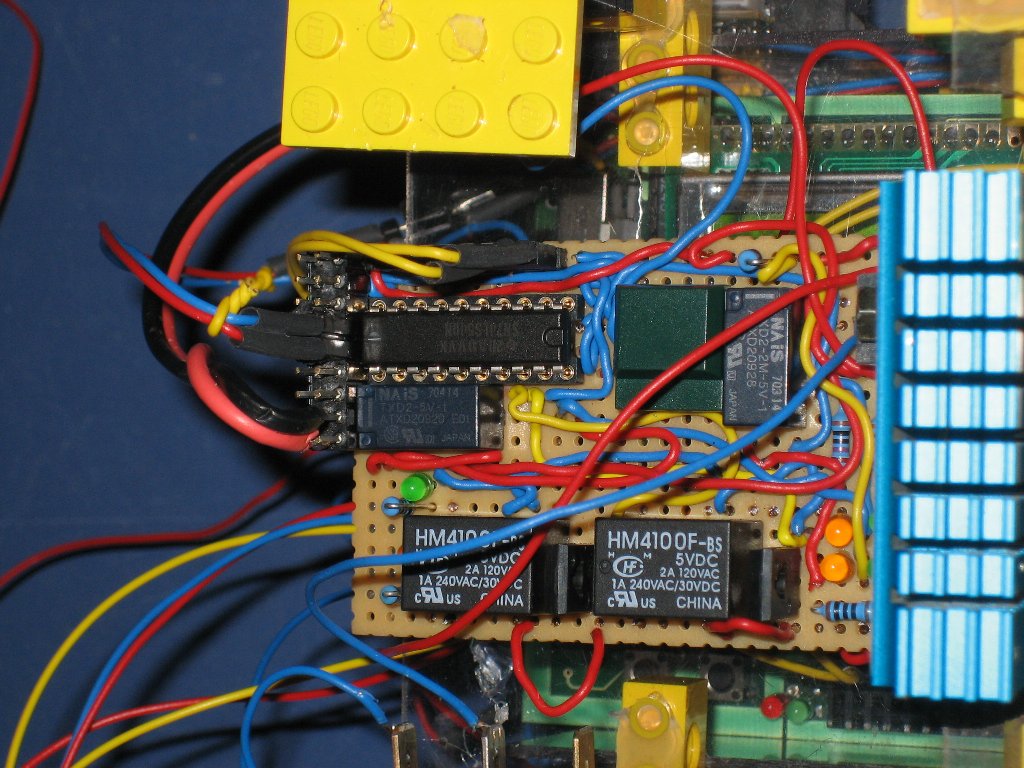
| Die Spannungssteuerung ... ... ist ein õu▀erst komplexes Netzwerk aus Relaisschaltungen, welche im einzelnen:
|
|||
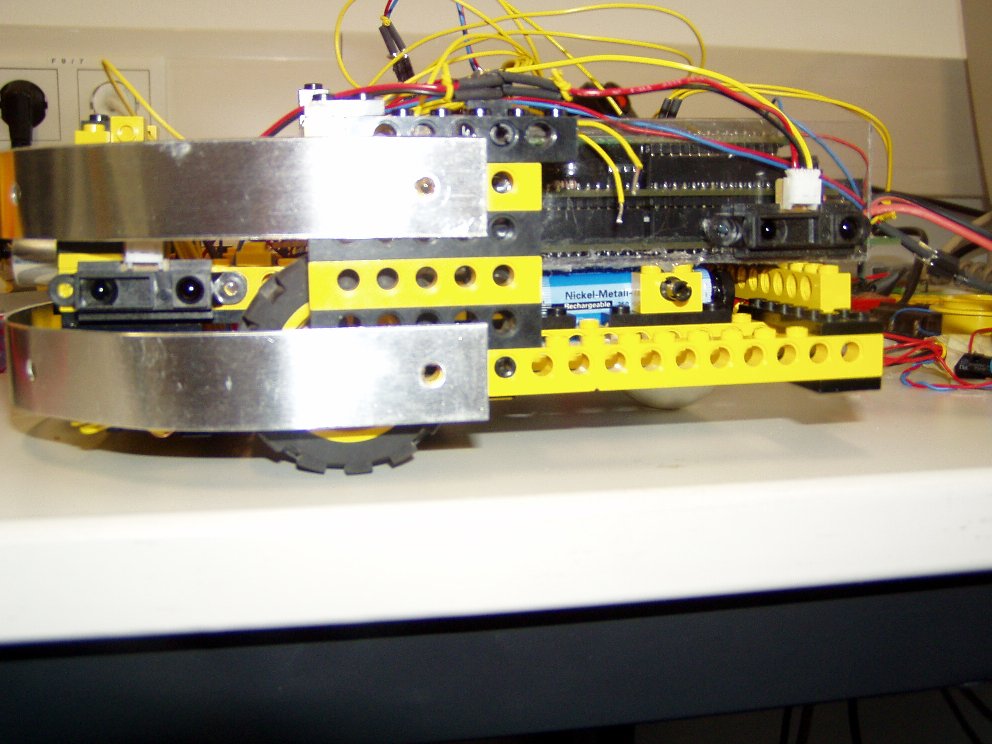
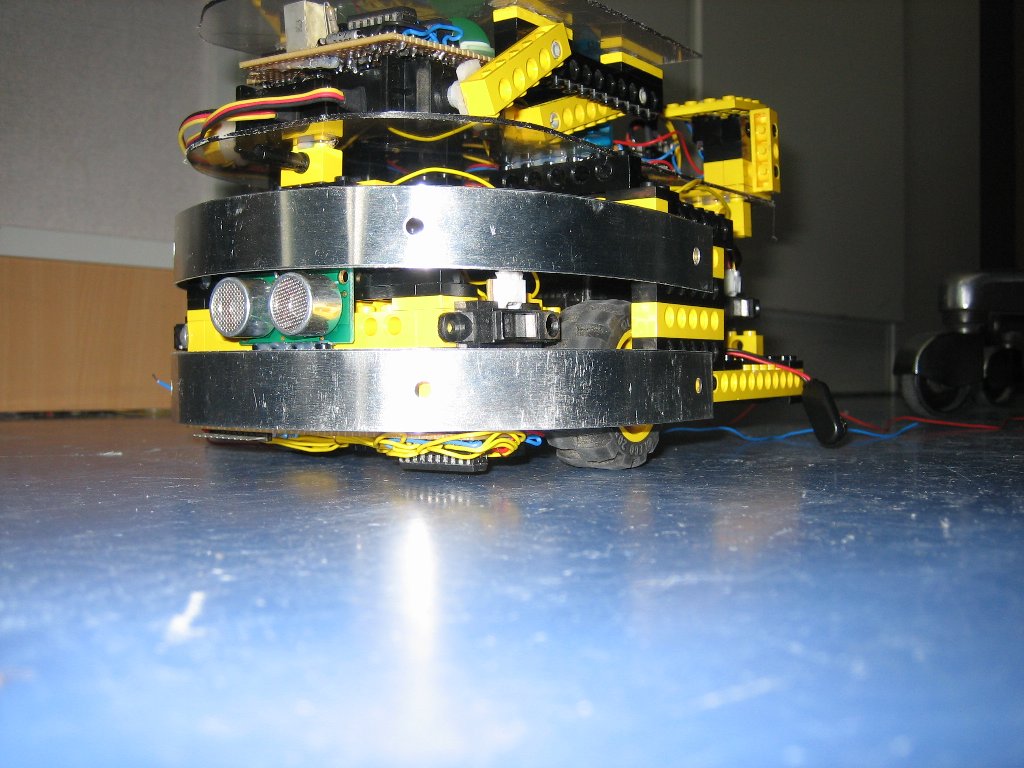
| Die reflexkoppler ... ... sind die Augen des GOLEM II nach unten hin und sie sollen es erm÷glichen, einer Kontur zu folgen:
|
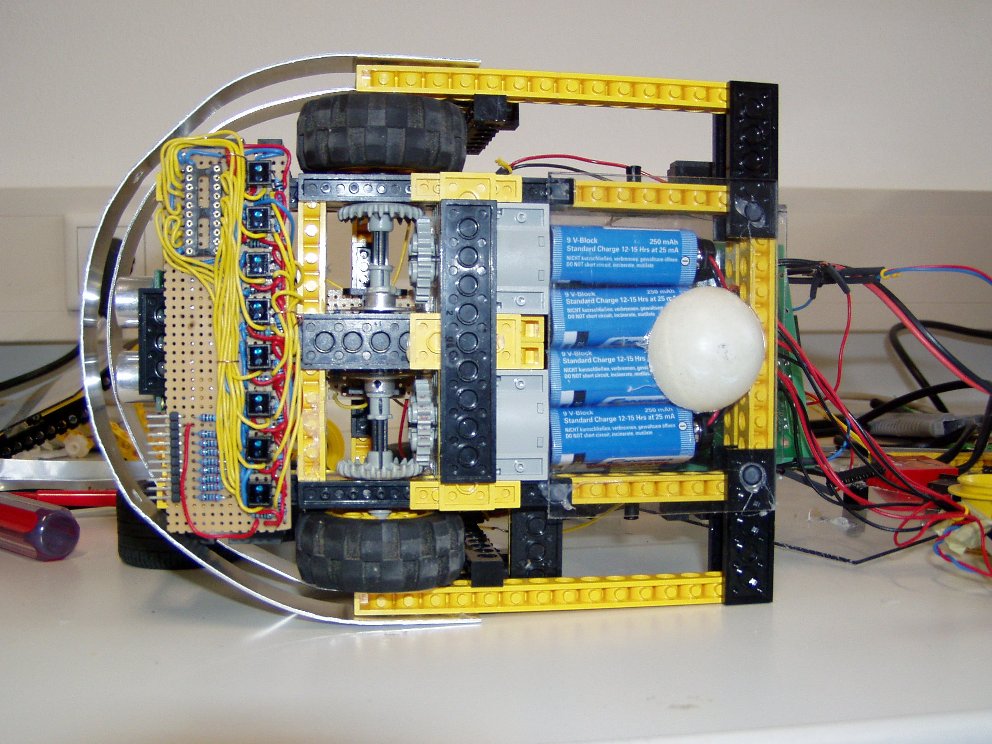
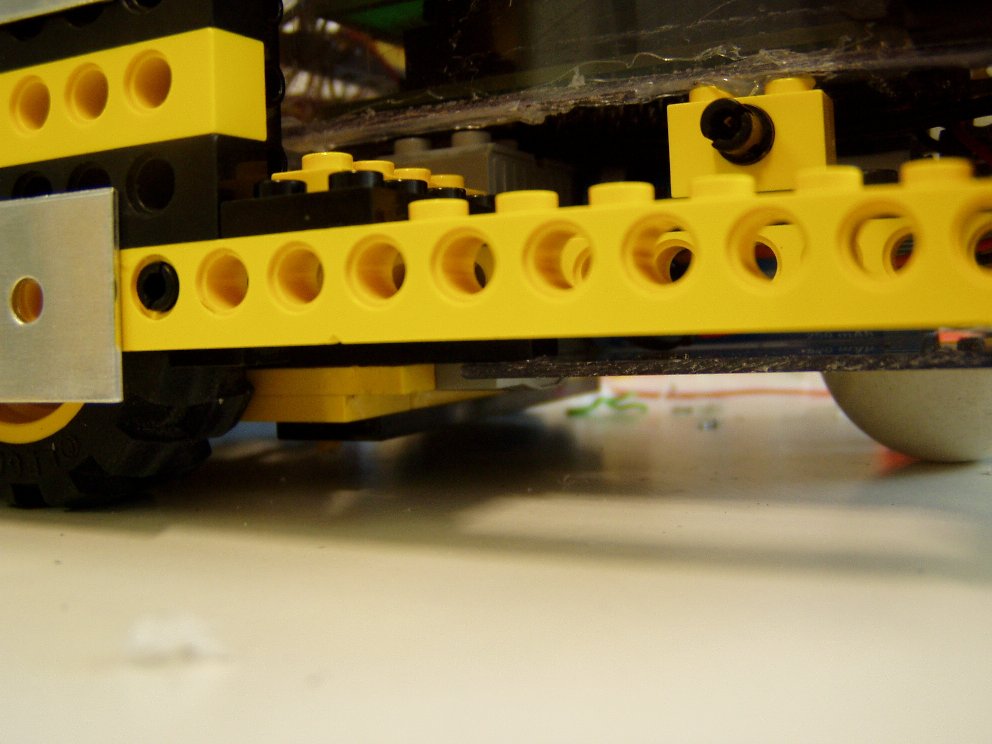
|||
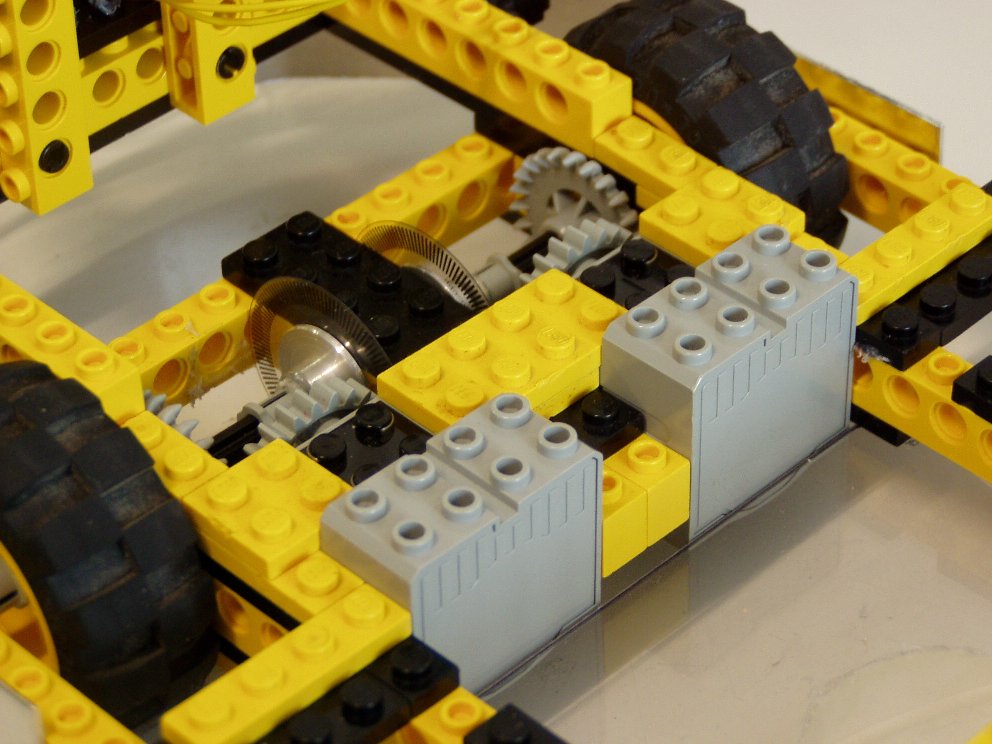
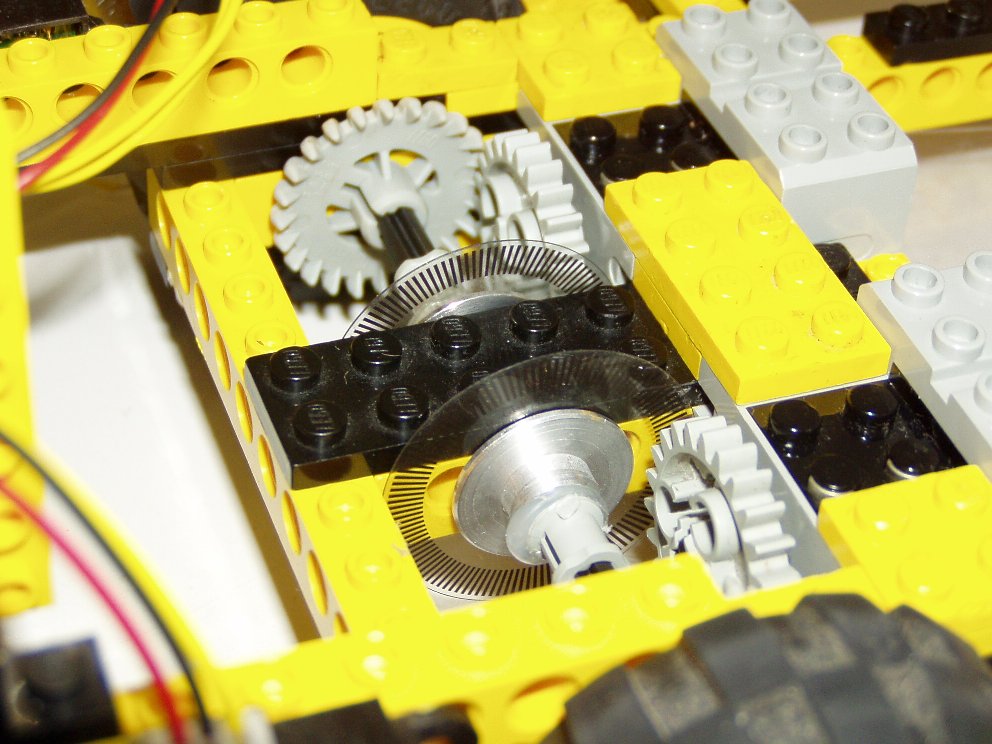
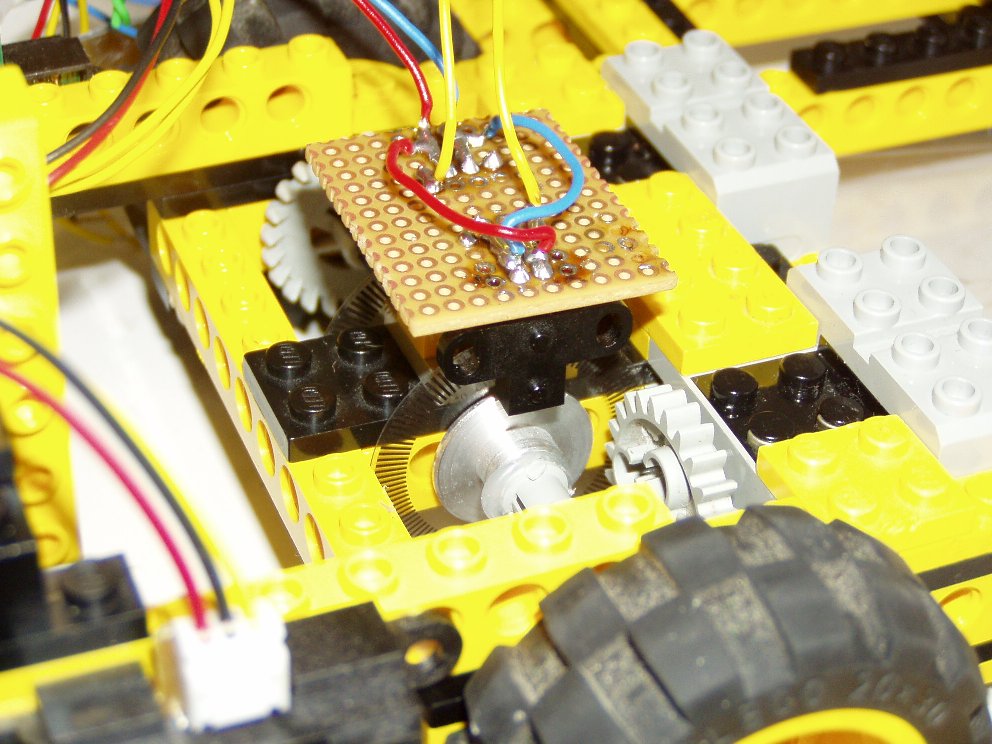
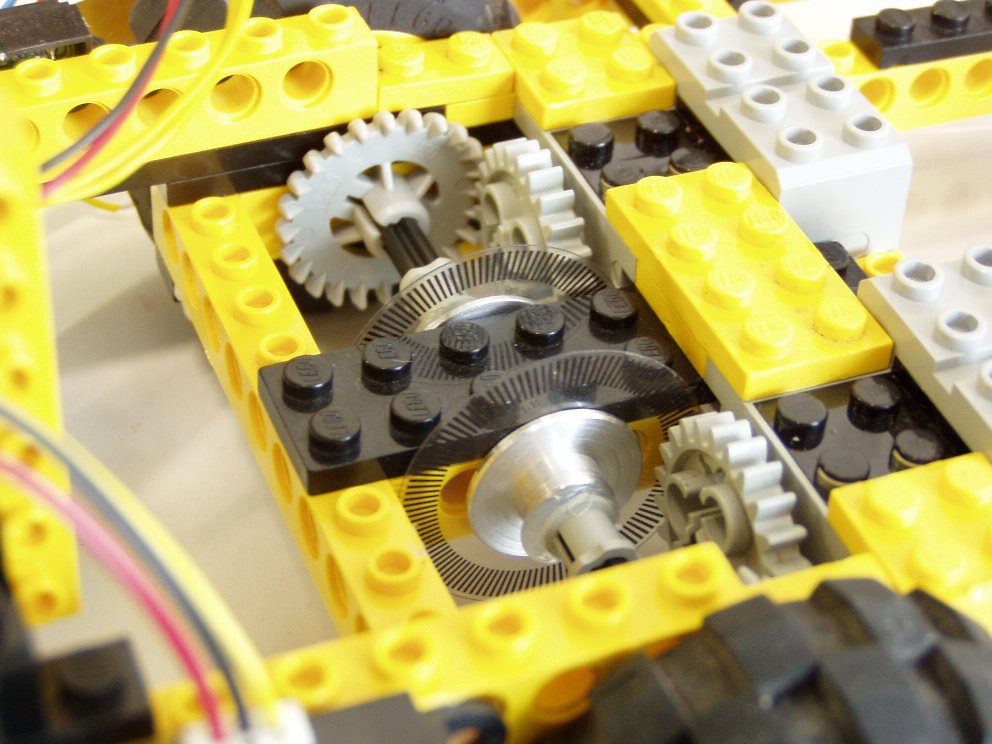
| Die Radencoder ... ... haben die Aufgabe GOLEM II wirklich gerade fahren zu lassen, denn auch geringf³gigste Unterschiede im Drehzahlverhalten von Elektromotoren bewirken ein Abdriften - die Maschine fõhrt schrõg. Radencoder k÷nnte man nat³rlich auch mit Drehzahlmesser ³bersetzen - dies trifft's aber eben nicht ganz genau, denn wir bemerken Unterschiede im Gleichlauf, nicht Unterschiede der Drehzahlen (obwohl das irgendwann auch einmal das Gleiche ist - hõngt eben vom Unterschied ab)
|
|||
| Die Reflexkoppler ... ... arbeiten eng mit dem Ultraschallsensor zusammen ... m³ssen ³ber ein Relais bei Bedarf zugeschalten werden - sie ziehen immerhin mit 8 Kopplersõtzen 500 mA Strom und wird nicht immer ben÷tigt
|
|||
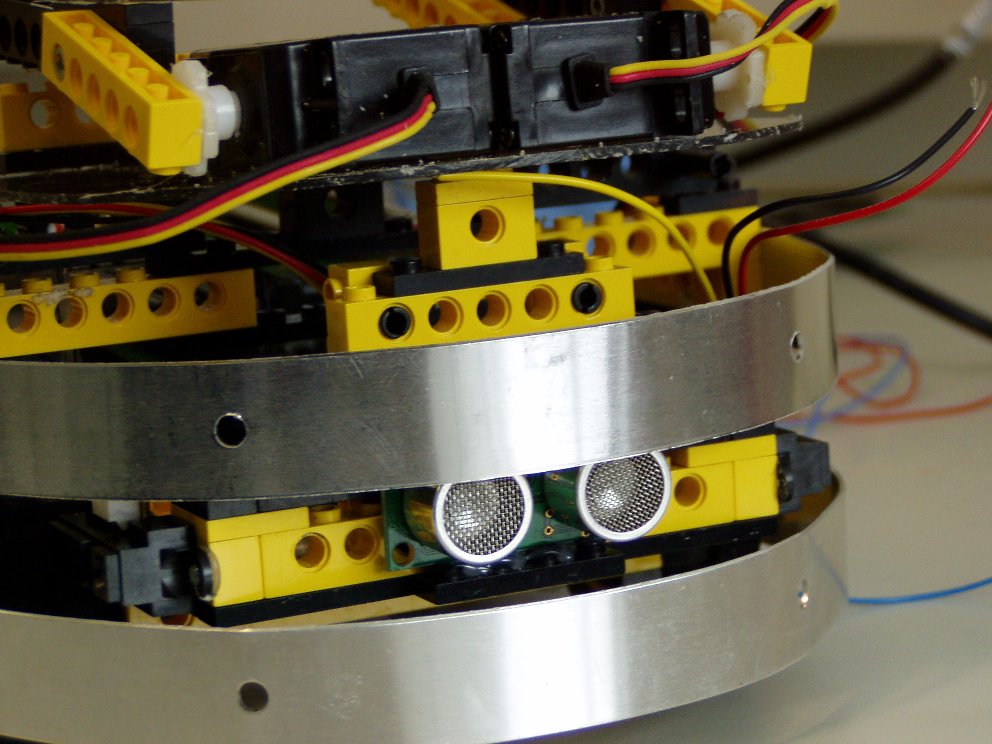
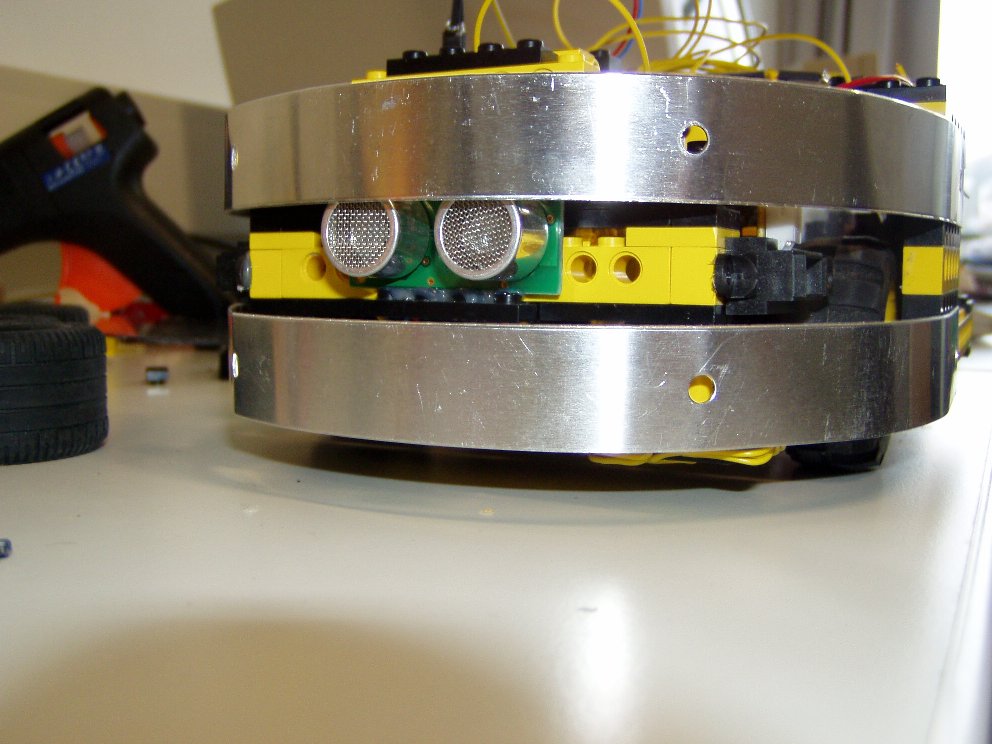
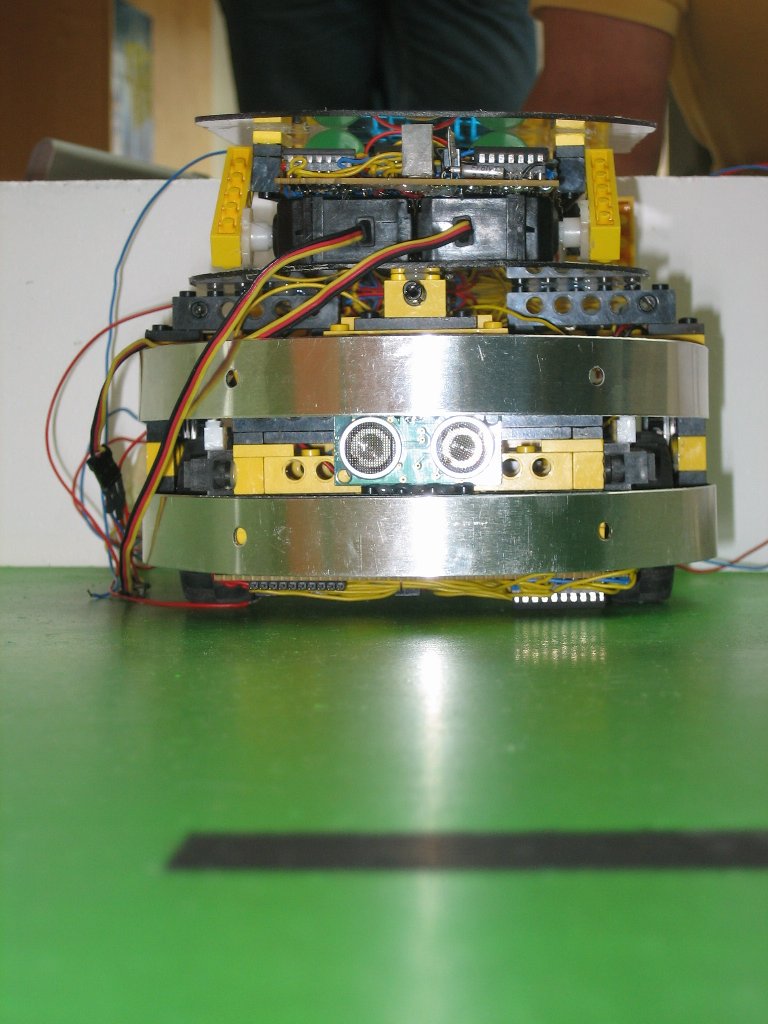
| Der Ultraschallsensoren ... ... misst den Abstand zu einem Hindernis - dies allerdings innerhalb eines relativ gro▀en Erfassungskegels, was ung³nstig ist |
|||
| Die Infrarotsensoren ... ... arbeiten eng mit dem Ultraschallsensor zusammen |
|||
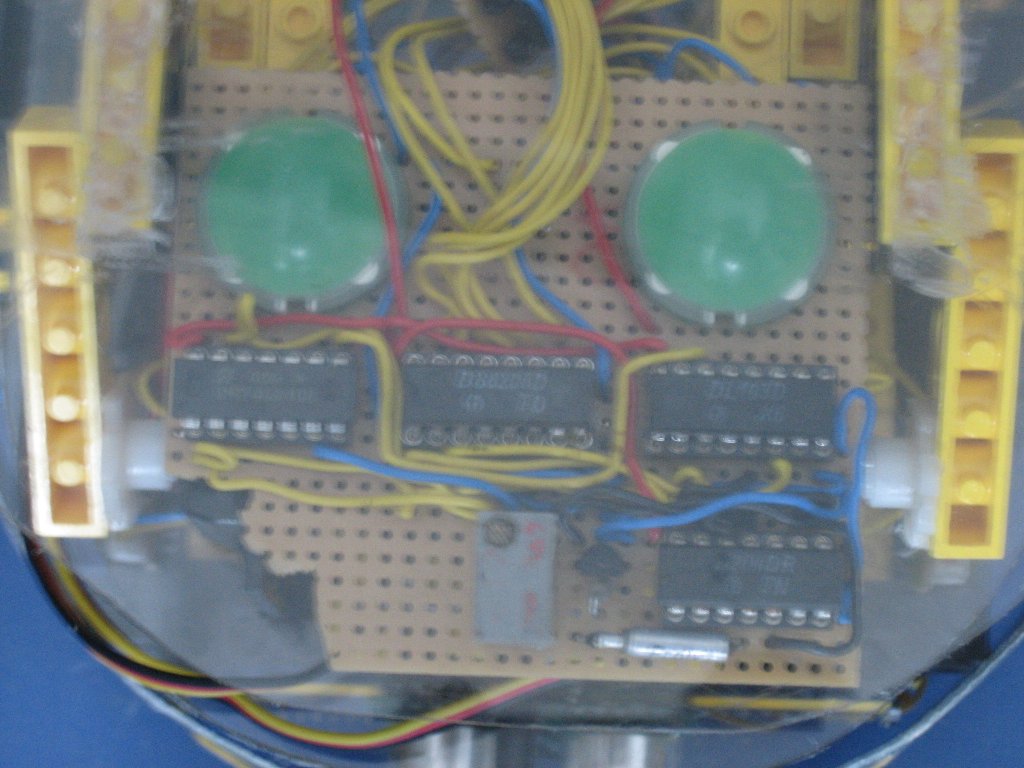
| Die rollenden Augen ... ... sind ein rein
elektronischer Gag, der auch 'ne Menge Strom zieht - sie sind deshalb
abschaltbar
|
|||
| Die Namenszug im Sechzehnsegment-Display ... ... ist eine Multiplexerschaltung bezogen auf die anzuzeigenden Digits (Stellen) |
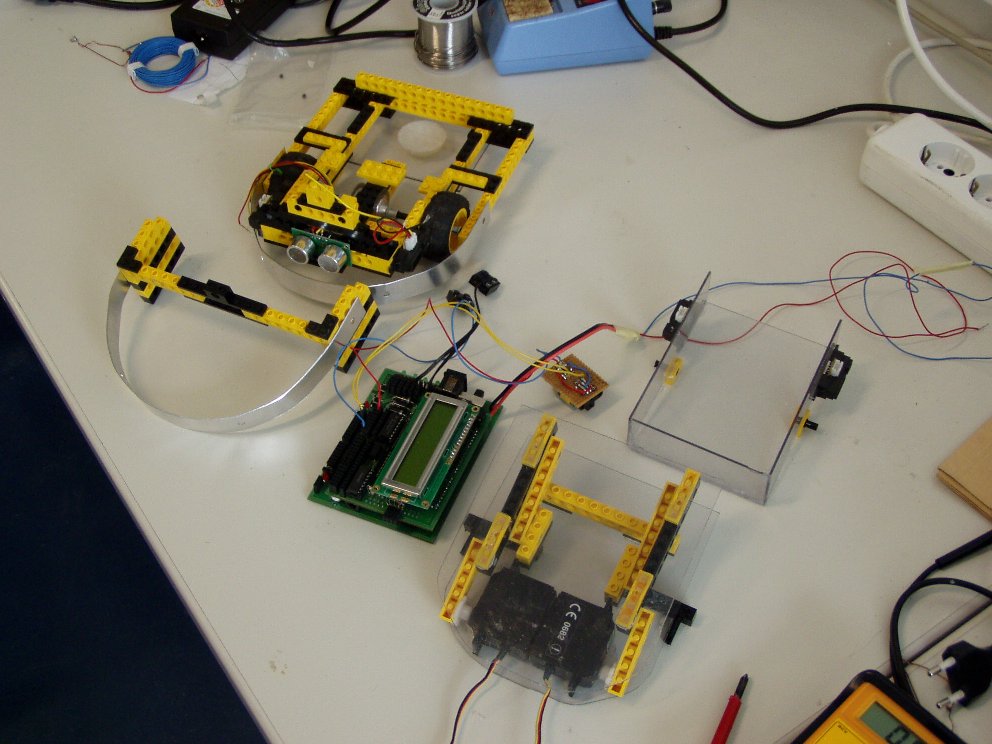
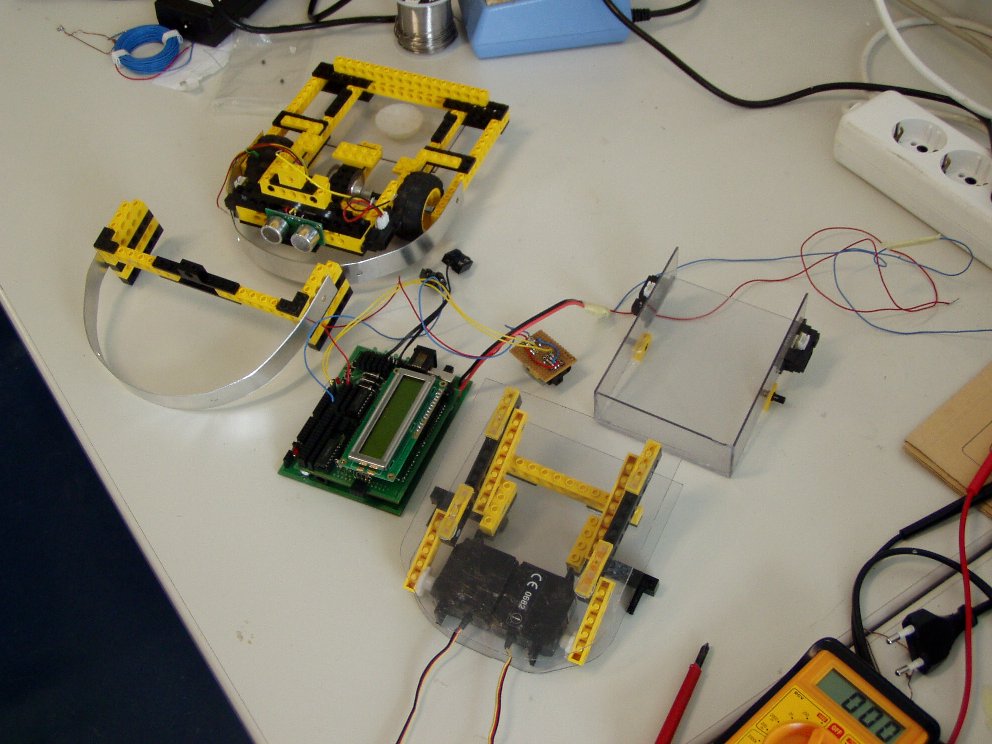
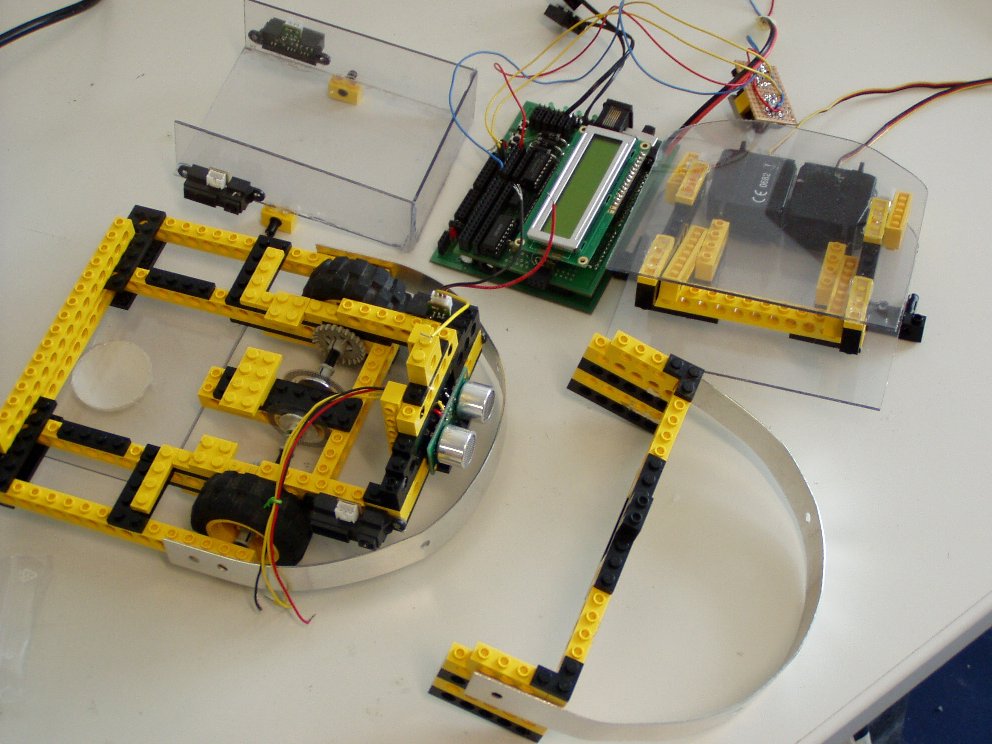
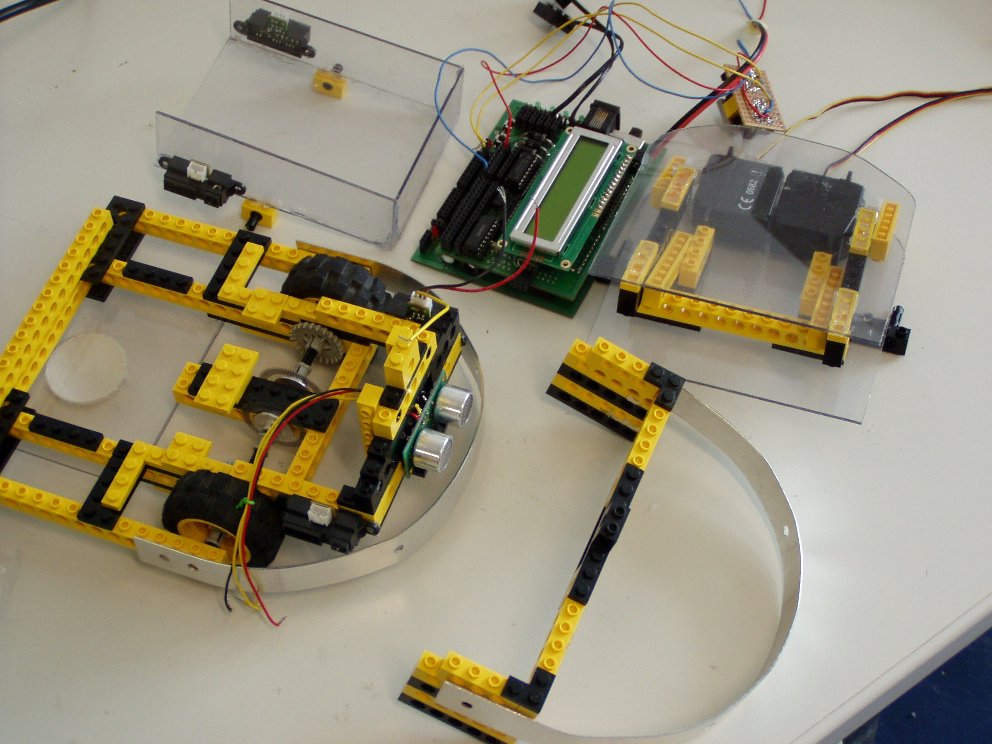
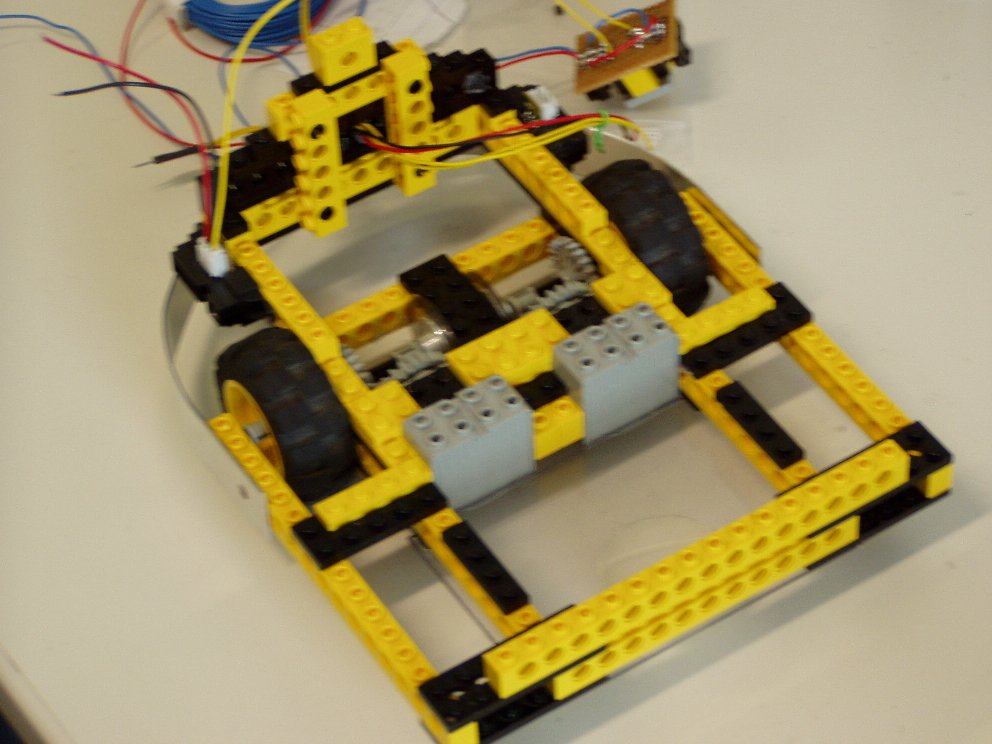
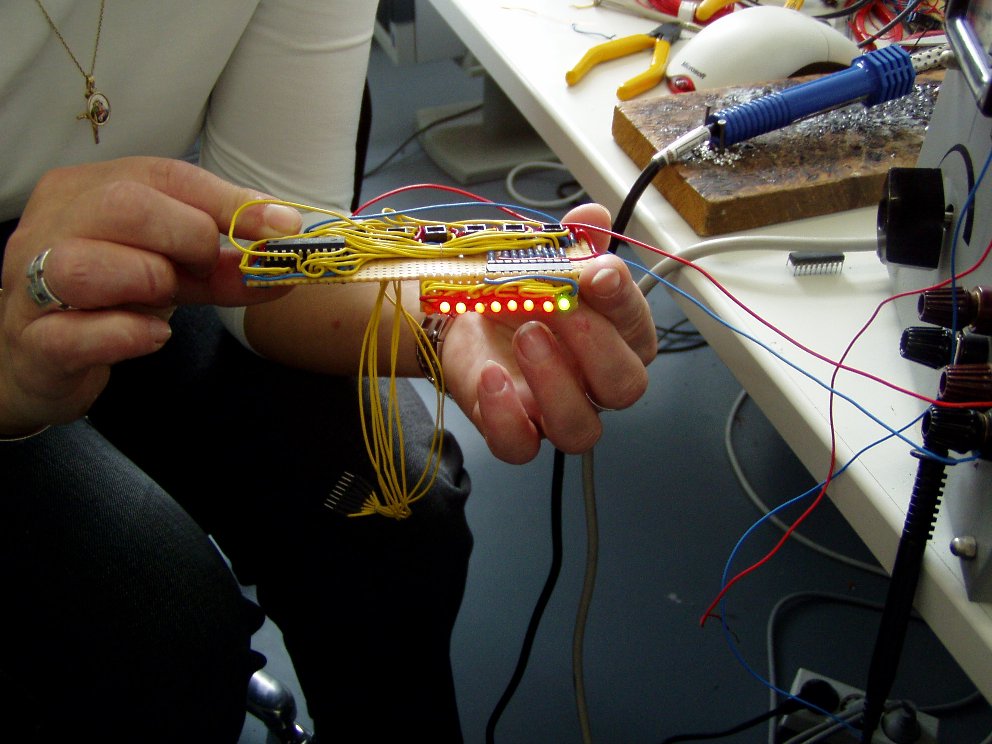
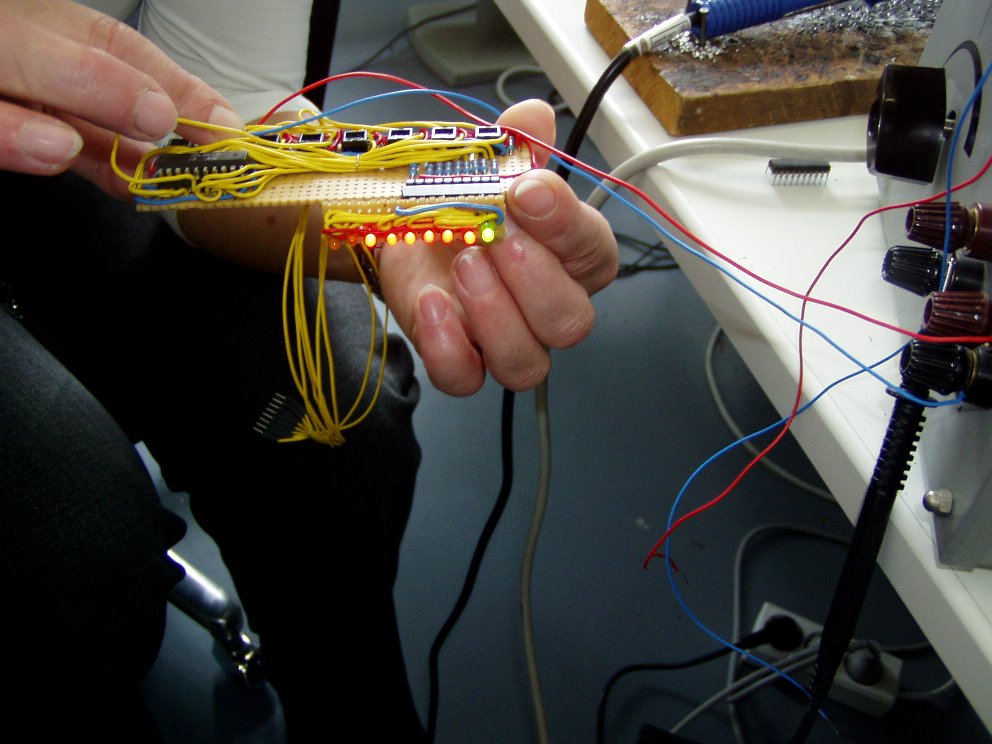
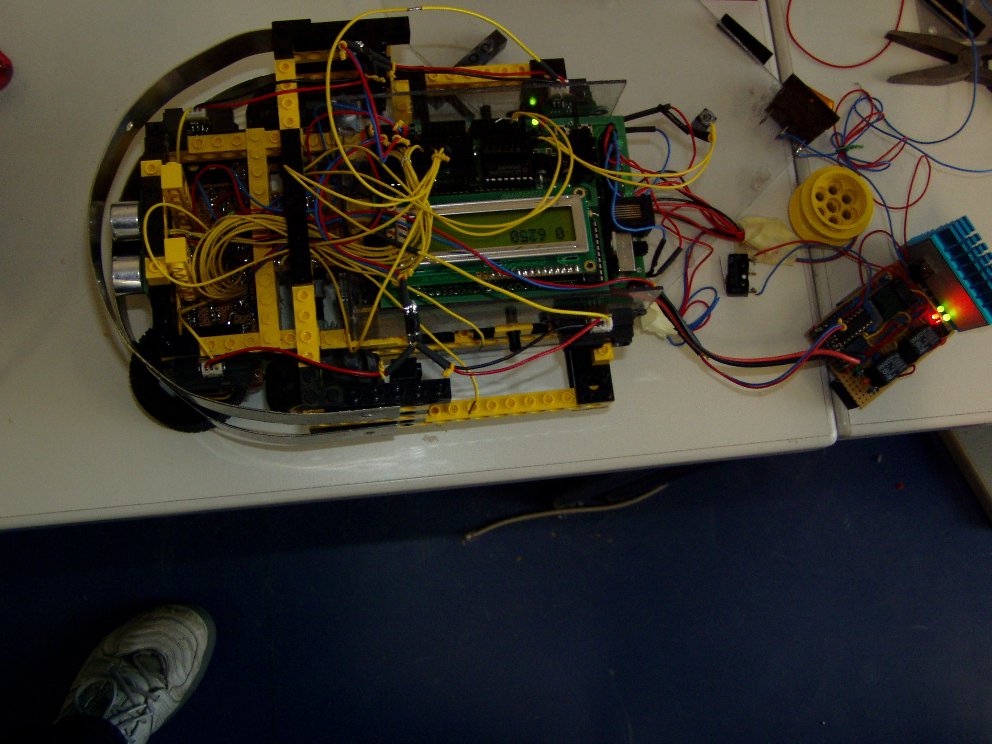
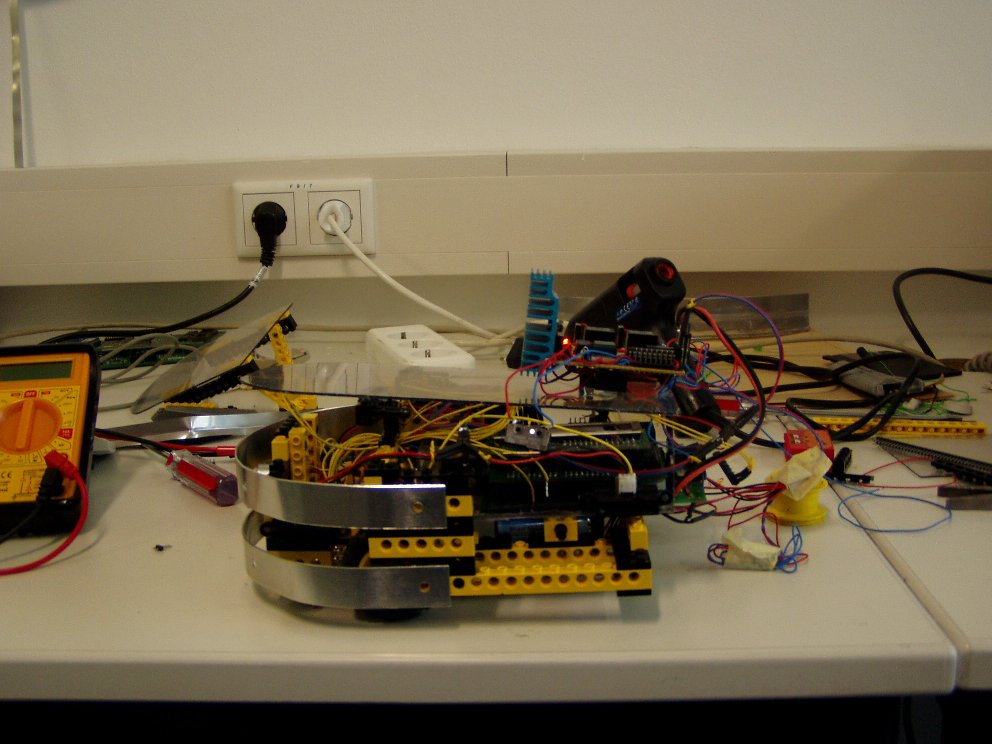
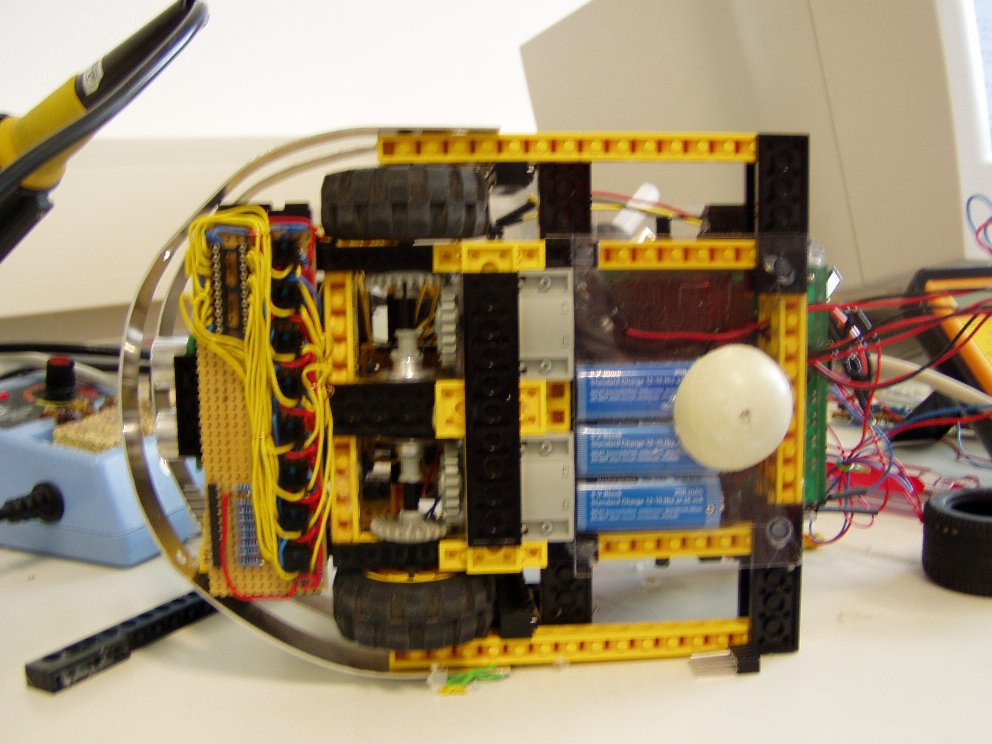
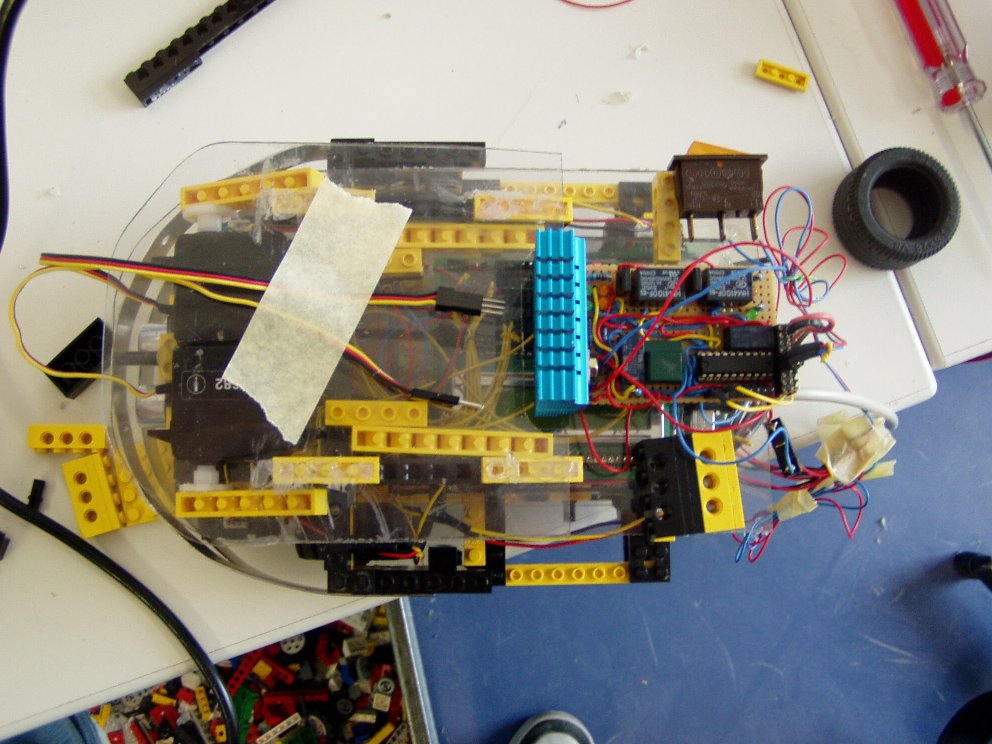
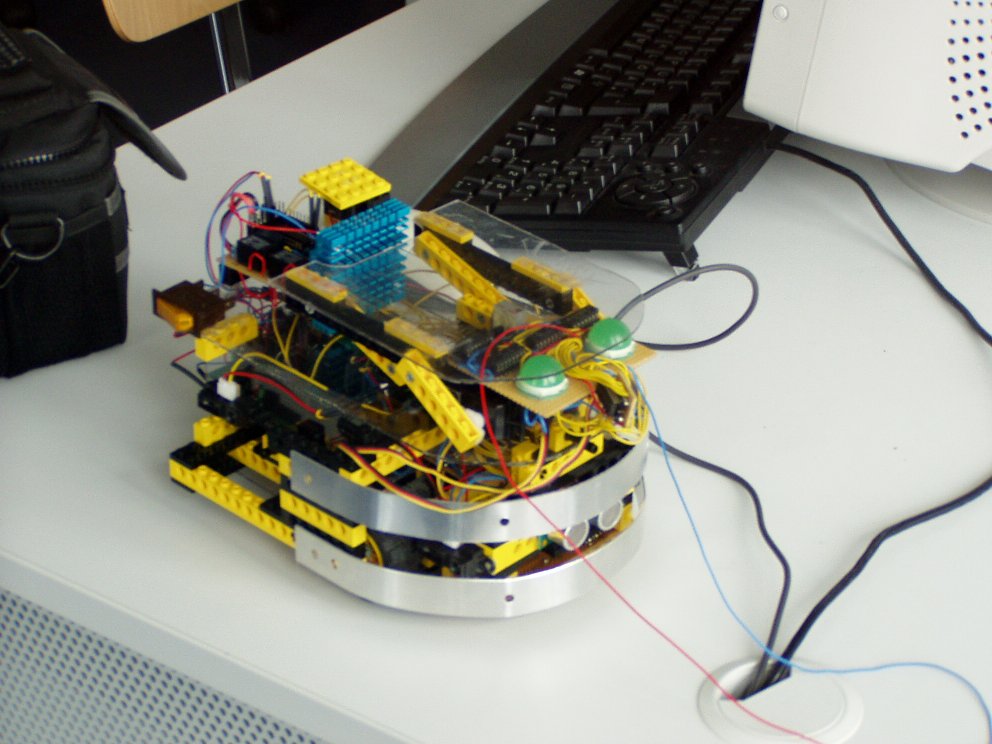
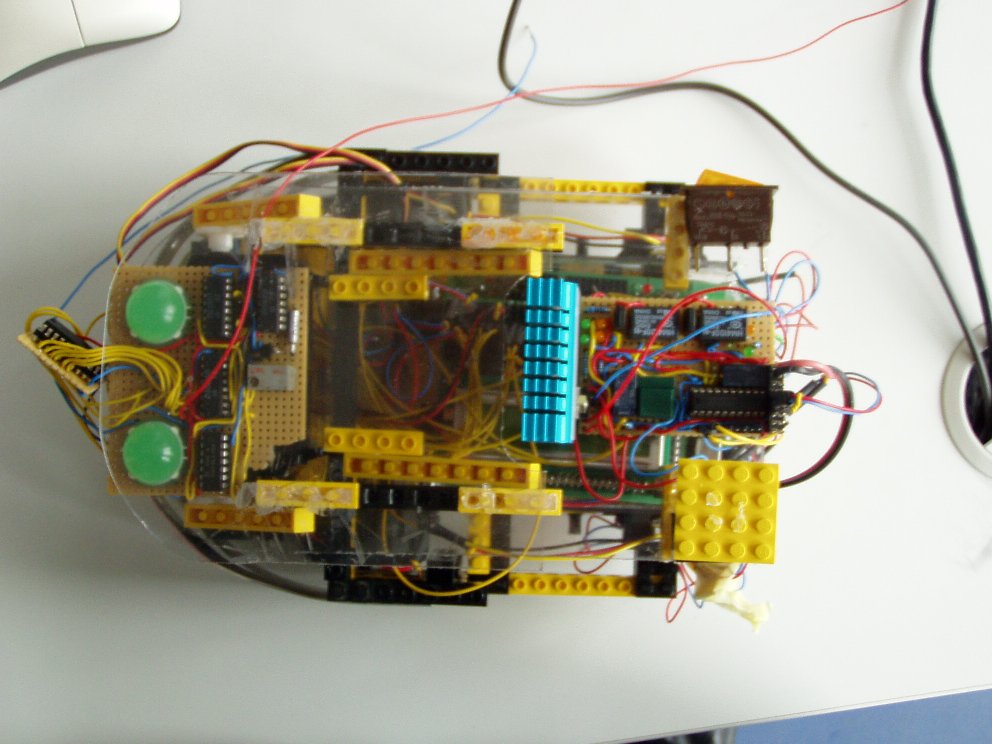
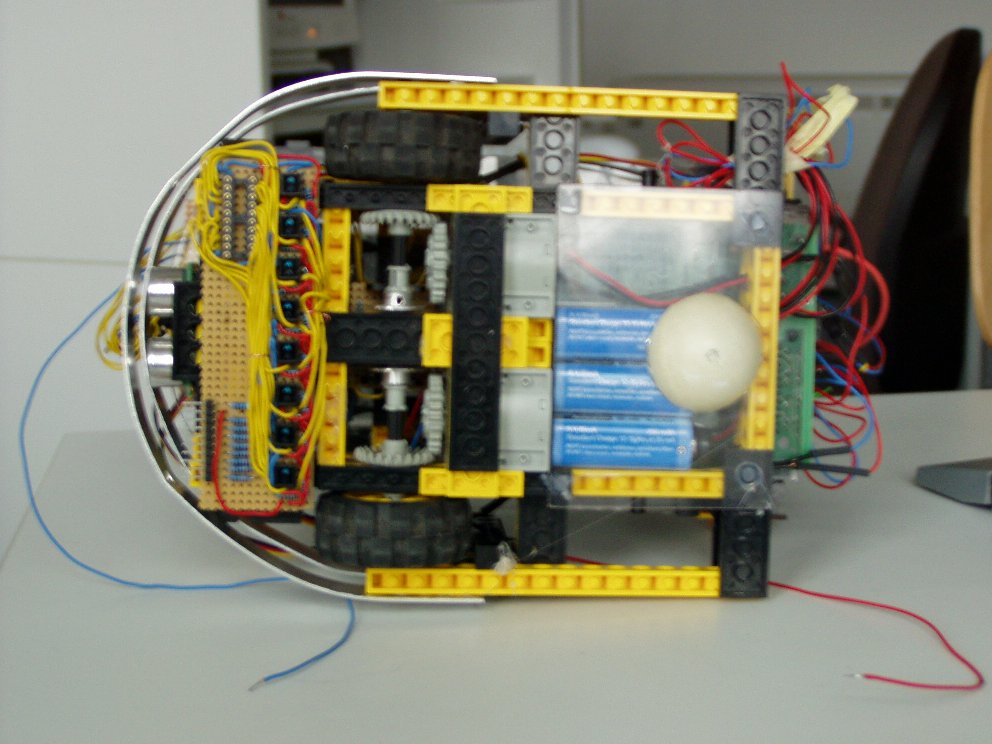
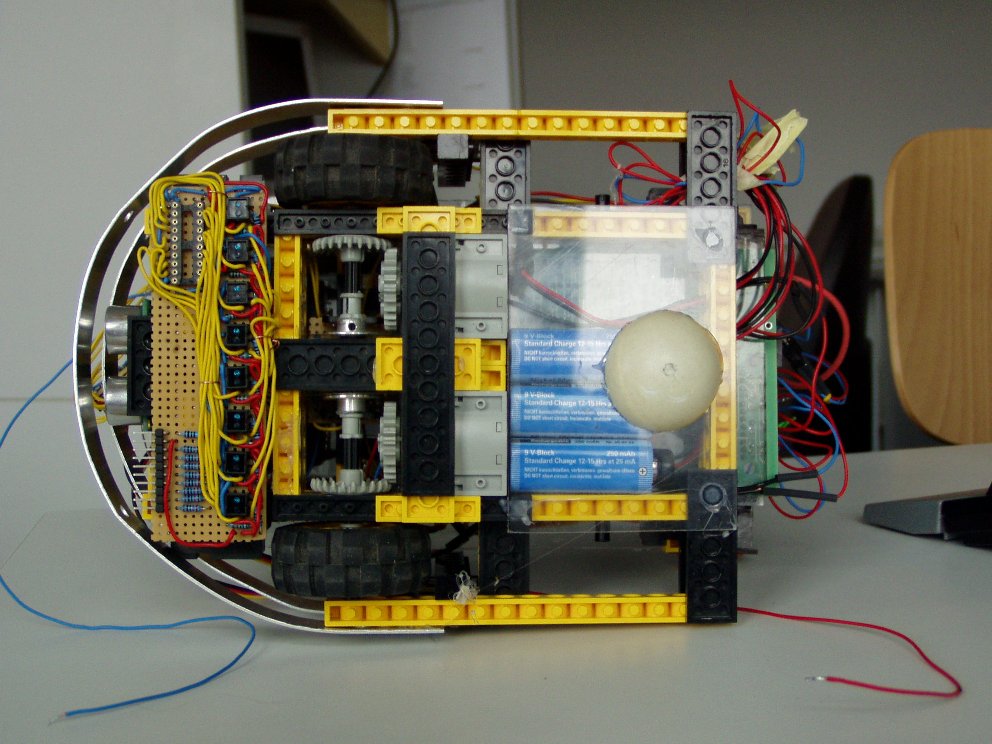
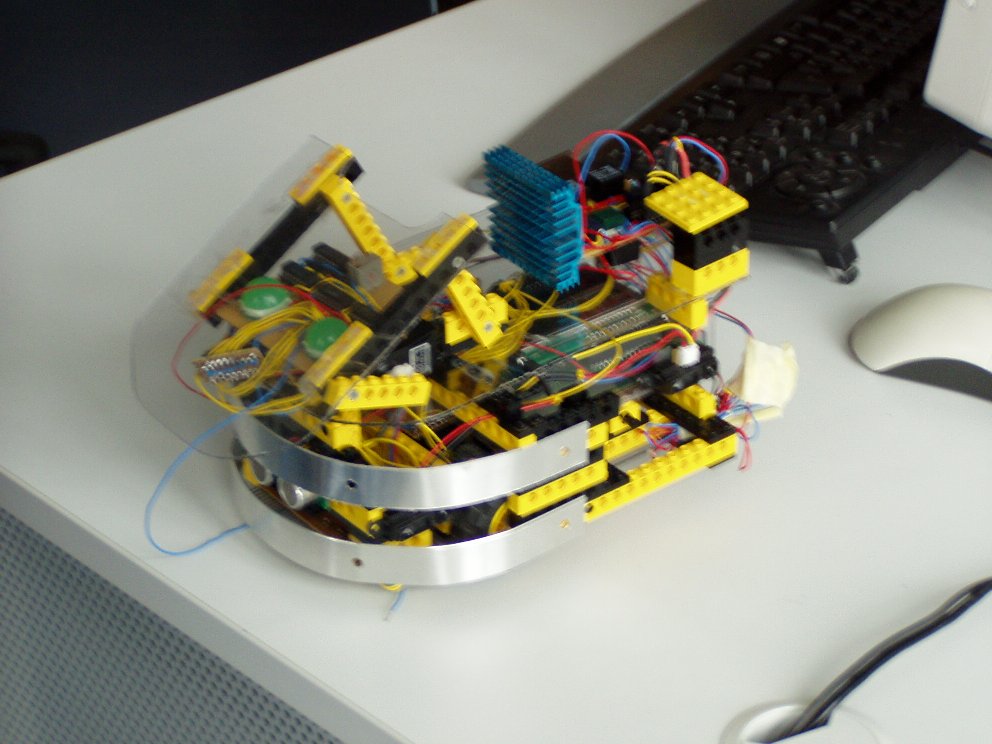
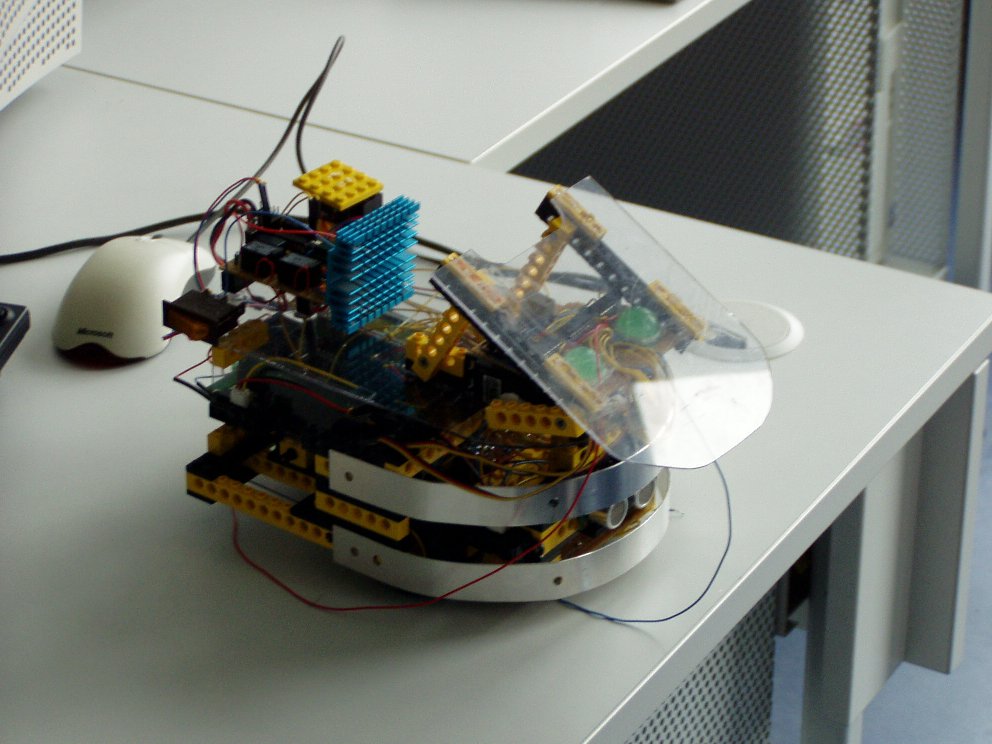
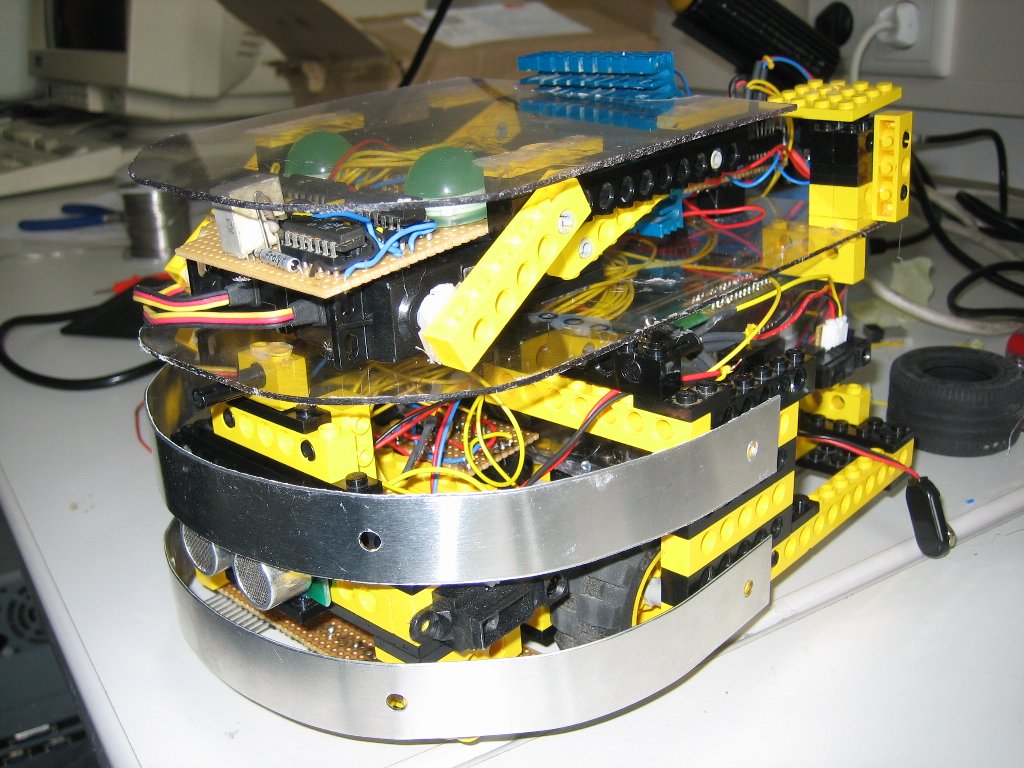
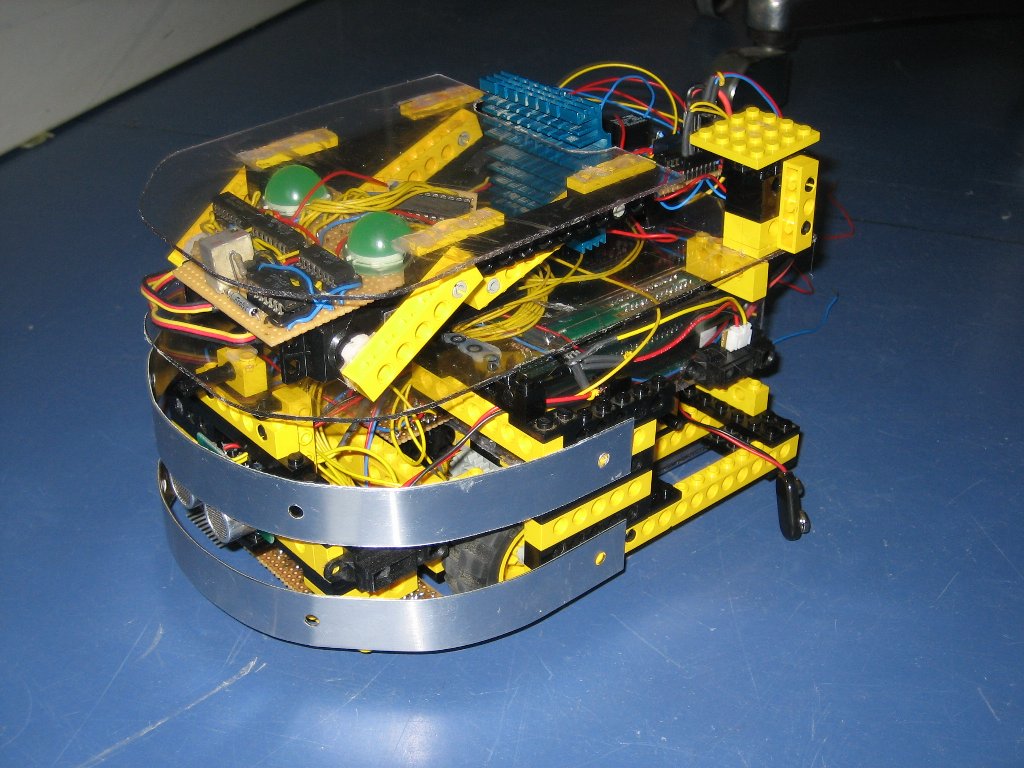
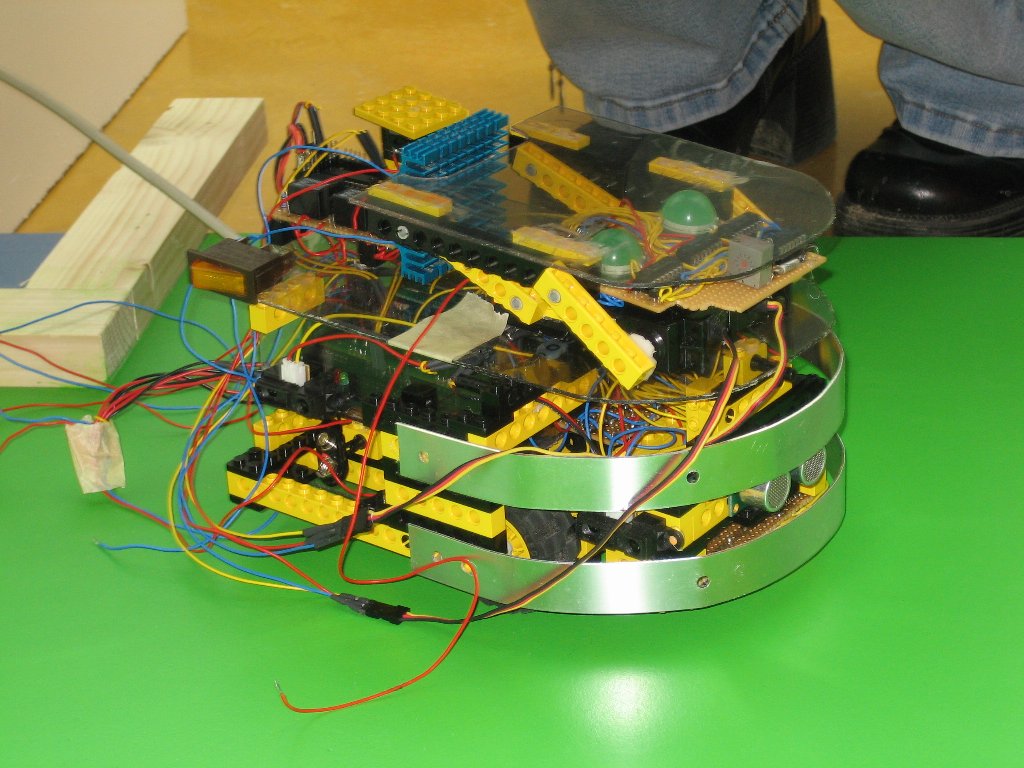
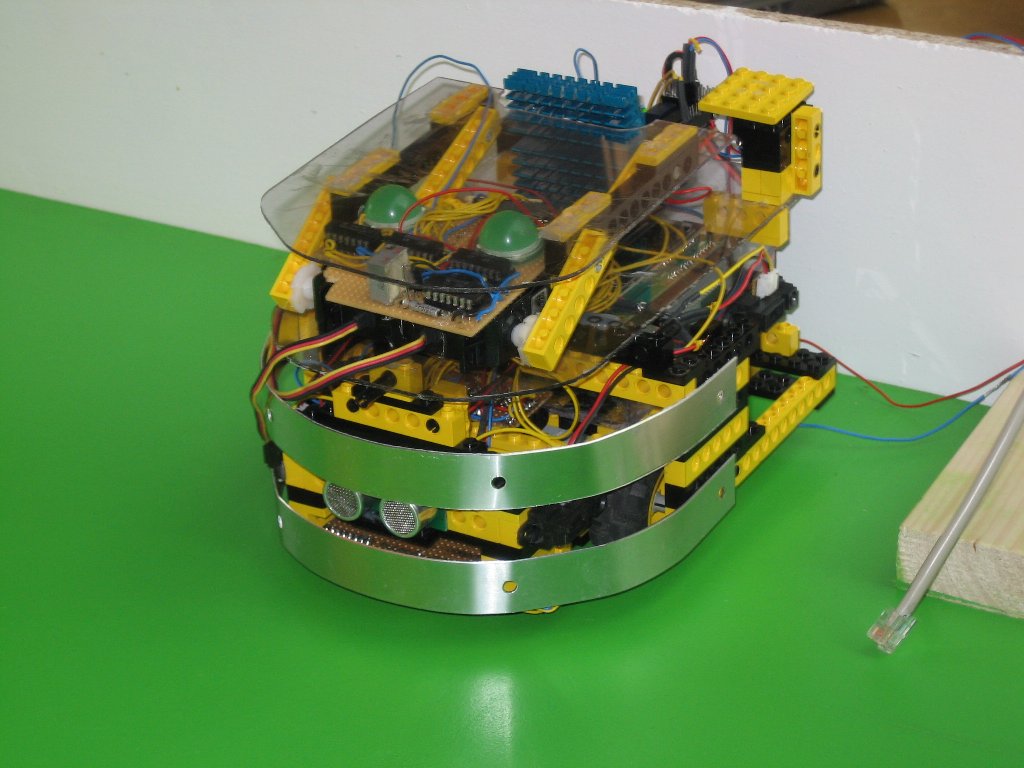
| 3. Fotodokumentation GOLEM II |
|
|
|
| 4. Vorbereitungen f³r Hannover 2006 |
|
|
|
|
|
Wir schreiben den 7. Mõrz im Jahr des Herrn 2006 -
der Roboking-Wettbewerb
bzw. dessen Vorbereitungen sollten ins Endstadium gehen - sind aber mitunter
wohl nur in einer Beginnphase oder ein wenig mehr - mit anderen Worten:
fertig sind wir nicht! Kennt das jemand so aus der Ausarbeitung von Belegen
und/oder Projekten, dann findet man sich auf der kleinsten gemeinsamen Linie
wieder ;-) |
||||||||||||||||||||||||
|
|||||||||||||||||||||||||
|
zur Hauptseite |
® Samuel-von-Pufendorf-Gymnasium Fl÷ha | ® Frank Rost im Februar 2006 |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) äDieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei äfō!ō Diddi Hallervorden, dt. Komiker und Kabarettist |
|
Diese Seite wurde ohne Zusatz irgendwelcher Konversationsstoffe erstellt ;-) |











{kind=link}
{kind=link}