| Das Projekt "Rabbi Loew" 2010/11 mit Eelktronik-Modell sowie Softwarekonzept - nach dem sagenumwobenen "Vater" des Golems zu Prag |
|
|
Letztmalig dran rumgefummelt: 03.11.10 17:23:21 |
|
|
... soll uns den weiteren Vorstoß in
Naturwissenschaft und Technik erleichtern bzw. überhaupt erst einmal
ermöglichen. Hier wollen wir Elektronik und
Mechanik sowie Meßtechnik miteinander verbinden und dem Gymnasium das wieder geben, was ihm das offizielle
Bildungsangebot systematisch genommen hat: eine, wenn man so will,
polytechnische Grundbildung. Momentan ist alles mit heißer Nadel gestrickt, ganz einfach deshalb, weil der letzte Wettbewerb in Hannover vorgezogen worden ist und somit die Zeiträume bis zum Zwischenwettbewerb ebenfalls zwei Monate früher liegen. Na und über die Sommerferien haben wir definitiv an anderen Projekten gearbeitet. Aber worum geht es überhaupt? Nun, im Jahre 2006 (bzw. 2007) sollen die Roboter der Schüler um die Wette die Folgen eines Steinschlages beseitigen (das ist natürlich eine Simulation von Teilprozessen). |
||||||
|
|||||||
| 0. Worum es
überhaupt geht - der Roboking-Wettbewerb der TU-Chemnitz ... 1. Die AG 2. Verwendete Technik 3. Vorbereitungen auf den Wettbewerb 2007/08 mit dem GOLEM V 4. Roboking-Vorrunden-Wettbewerb in Chemnitz 5. Roboking-Endrunden-Wettbewerb in Hannover (ab 7.März 2008 bis zur Vollständigkeit aktualisiert) 6. Verwandte Themen |
|||||||
Teilnehmer:
Betereuer: |
|||||||
|
Dank an unseren Sponsor - der Förderverein des Gymnasiums Flöha |
|||||||
 |
| 1. Die AG |
|
|
|
|
|
Unsere AG hat sich im Mai 2005 gegründet. Das Ziel ist und bleibt auch für 2007 die mehr oder weniger erfolgreiche Teilnahme am Robo-King- Wettbewerb, welcher von der TU-Chemnitz ins Leben gerufen und jährlich ausgetragen wird. | ||
| Projekt "Rabbi Loew" - so der Arbeitsname, bis wir evtl. etwas besseres gefunden haben - oder aber: der Name bleibt! Anmerkung mit Stand Mai2007: der Name bleibt!!! | |||
|
|||
Was vorher geschah:
|
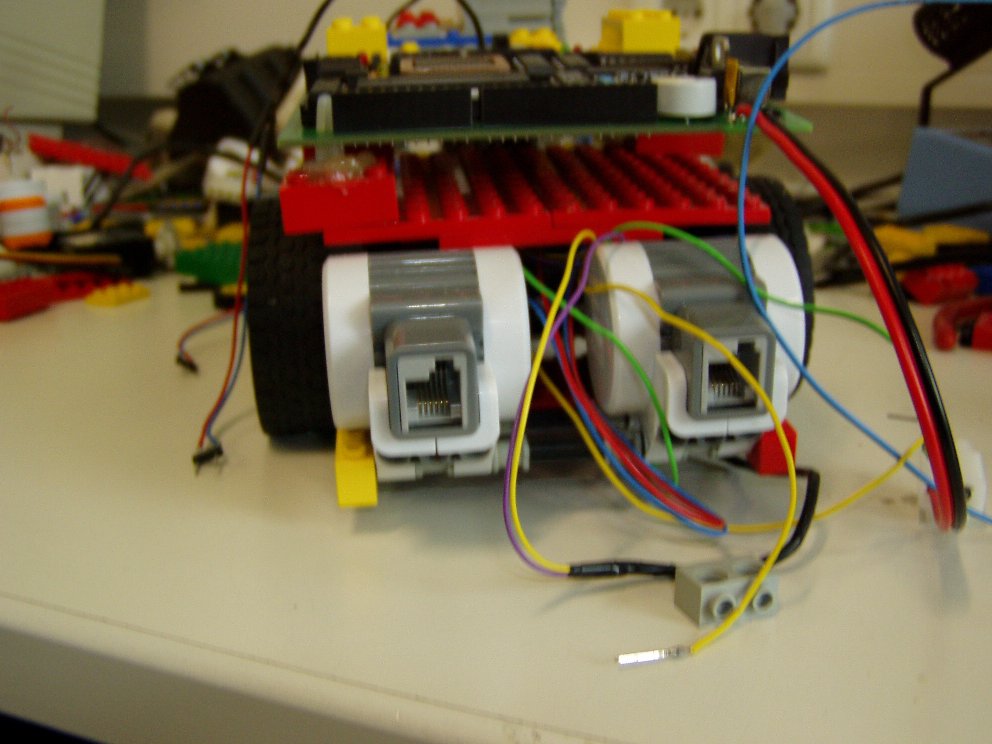
| 2. Verwendete Technik |
|
|
|
|
|
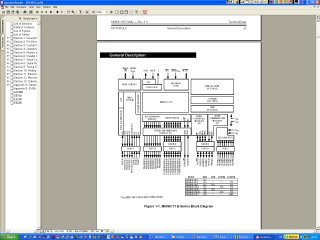
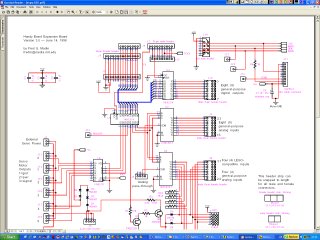
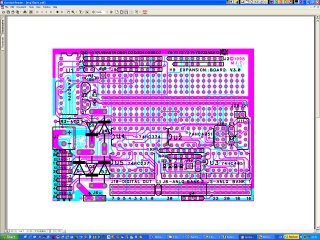
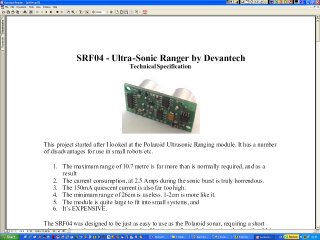
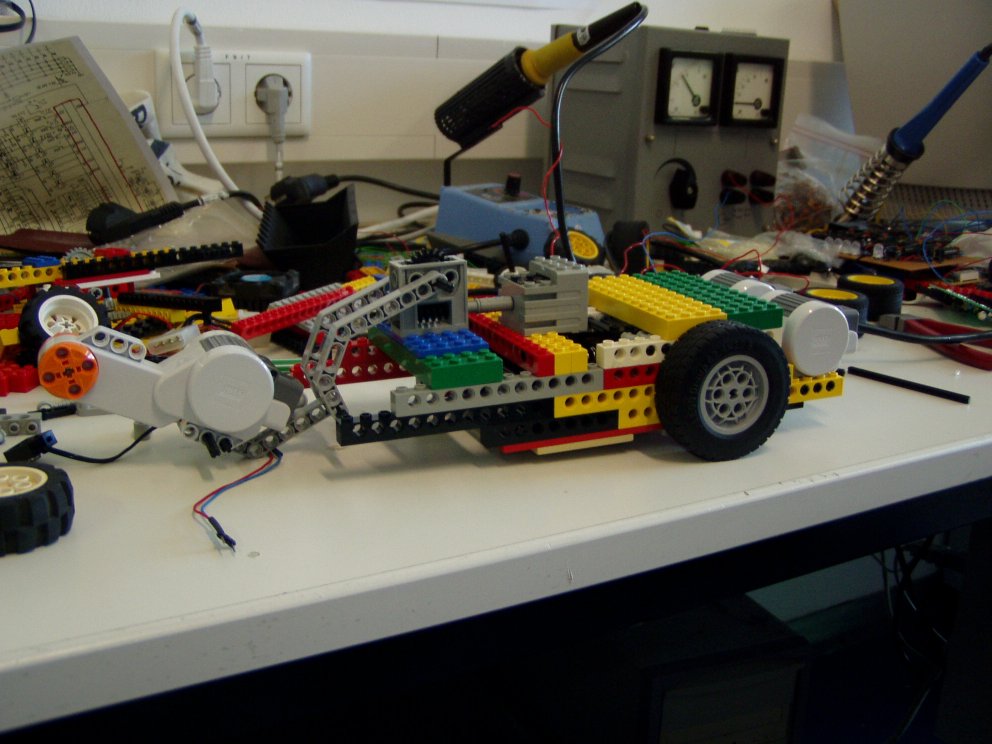
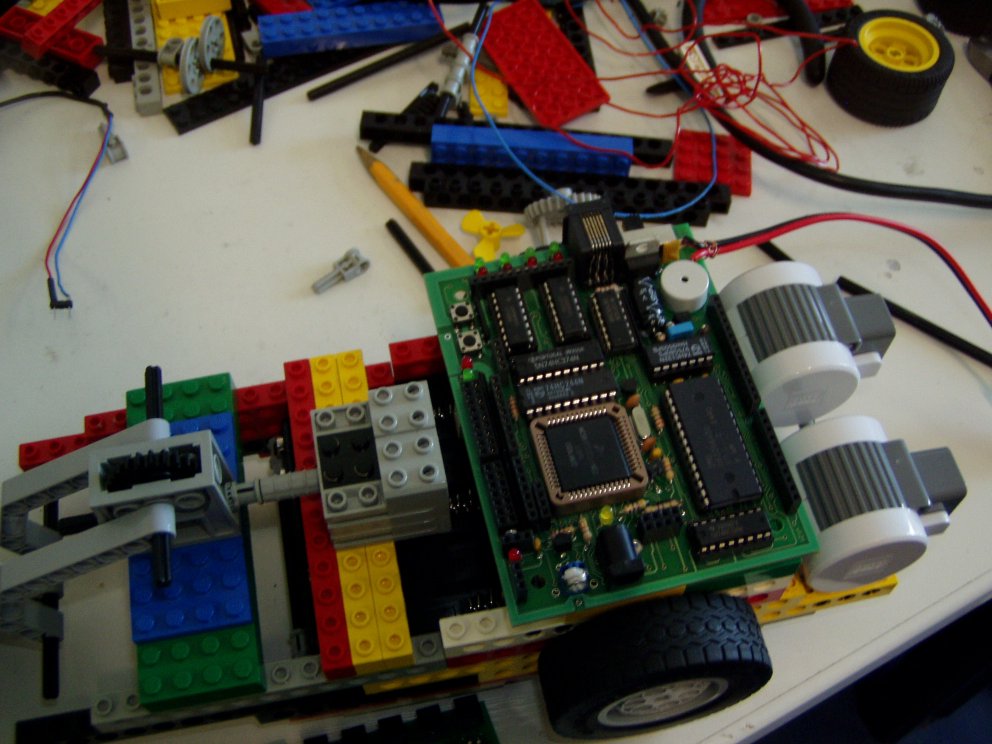
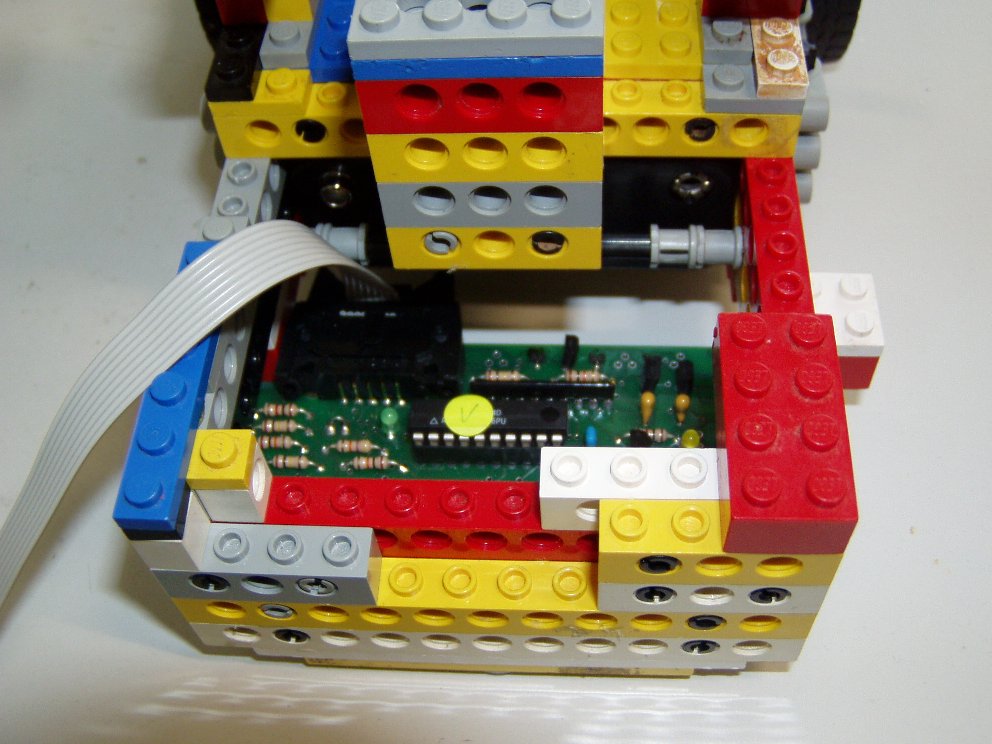
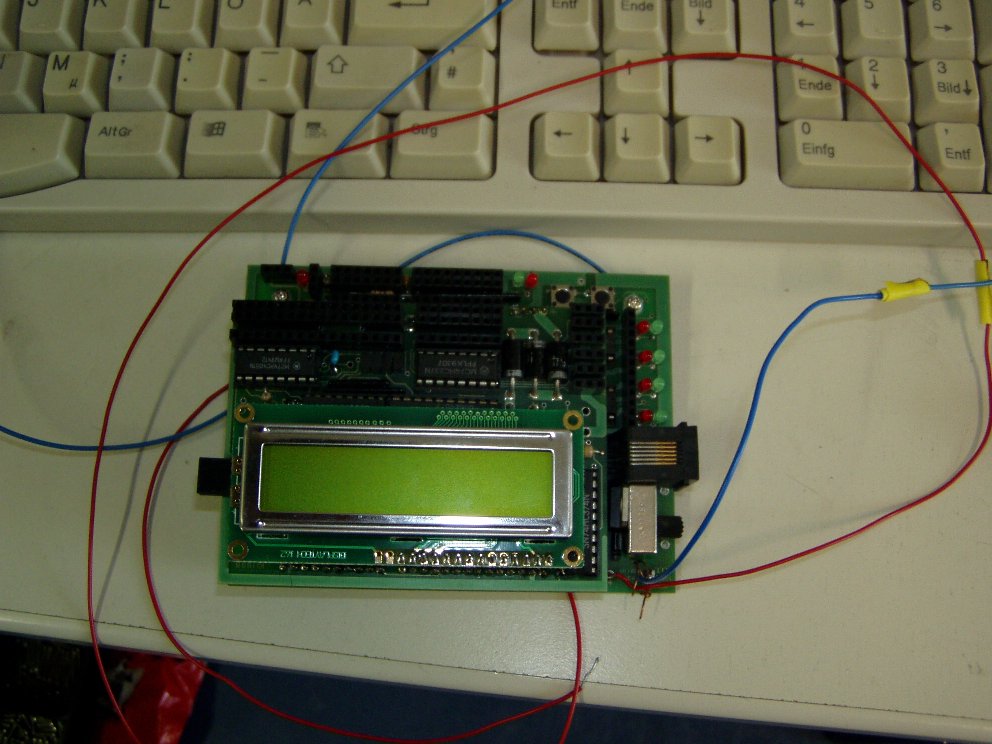
Inzwischen kennen wir uns in der eingesetzten Technik sowie der zugehörigen Programmiersprache ziemlich gut aus und können auch die entsprechenden Ports sowie Features des Handybords nutzen. Vorteilhaft sind für kleine Roboterbastler Kenntnisse in Mechanik (Getriebetechnik, Statik), Elektronik, Mikroprozessortechnik sowie Programmierung - kurz: eigentlich alles, was zur Informatik gehört. Und weil alles technisch beim Alten bleibt, hier nochmals die Links auf unsere eingesetzte Hardware | |||||||||||||||||||||
|
||||||||||||||||||||||
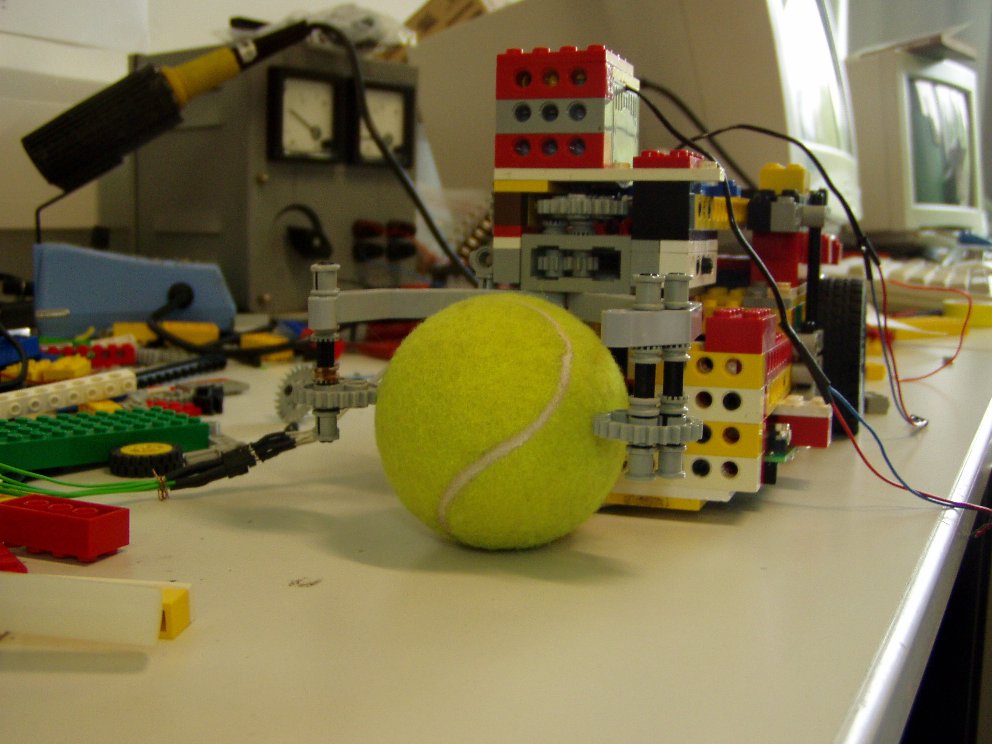
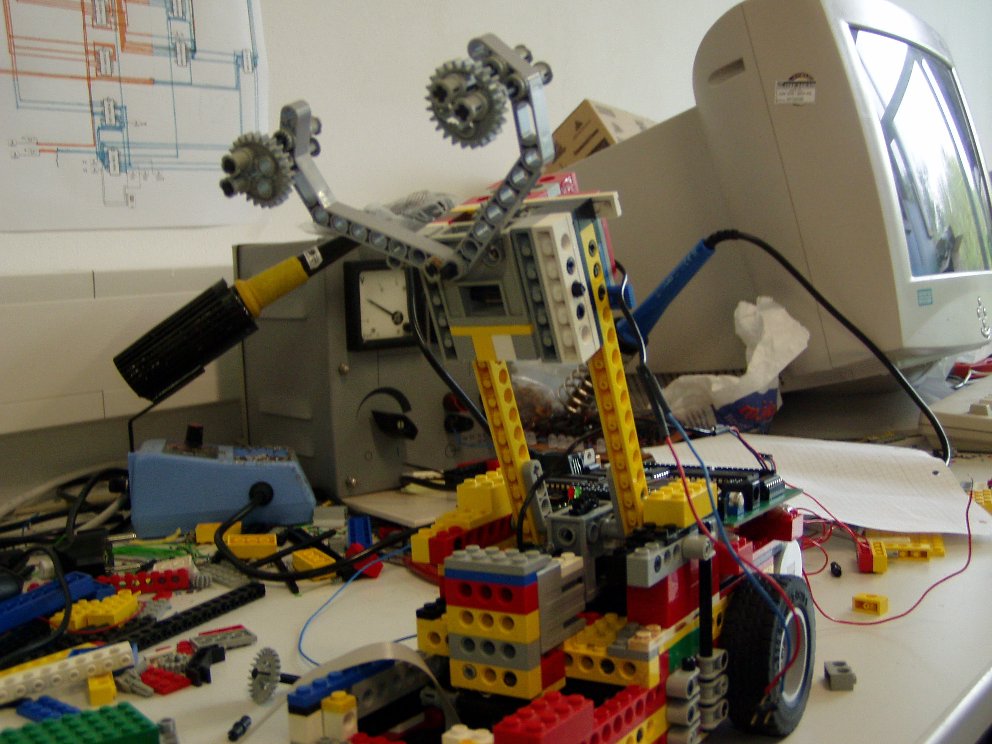
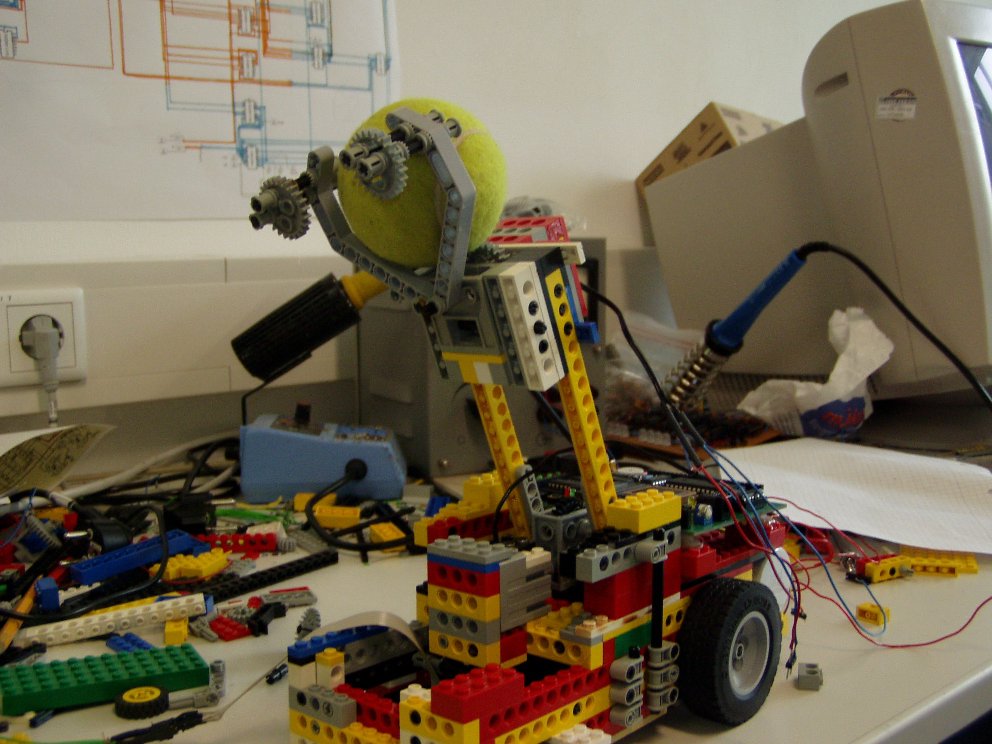
| 3. Vorbereitungen auf den Wettkampf 2007/08 mit GOLEM V |
|
|
|
|
|
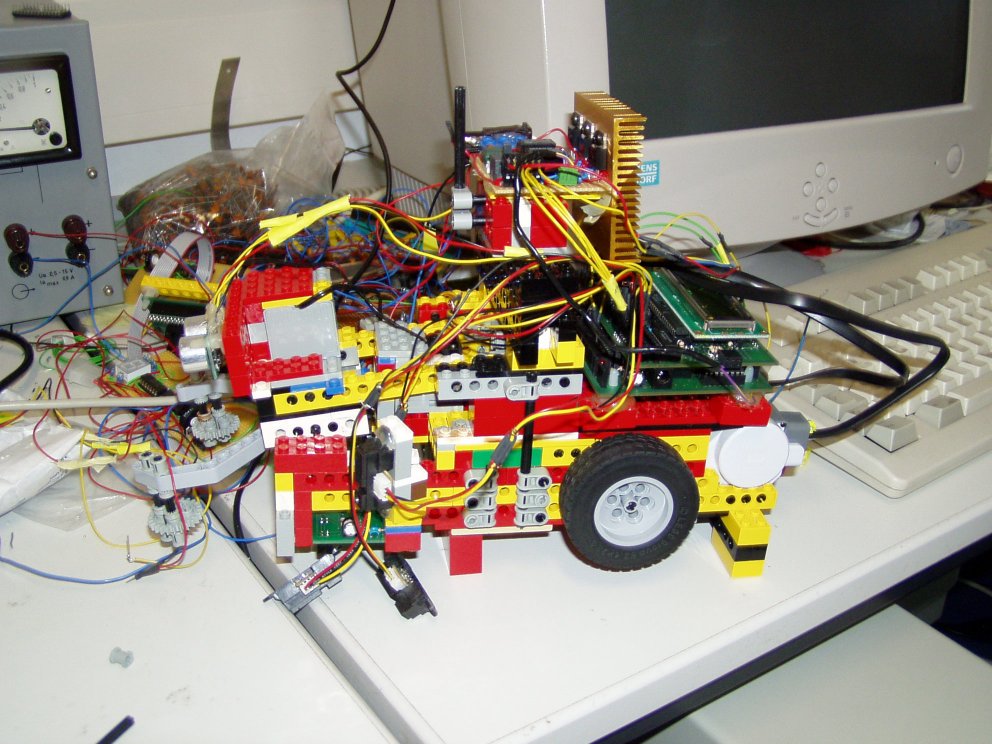
Der Start war in sofern einfach, als das wir uns lediglich termingerecht zu melden hatten sowie in einer Zwischendokumentation unsere Lösungsstrategie beschreiben mussten. Aber dann wurde es ernst, nämlich mit sauberen mechanischen sowie softwaretechnischen Lösungen, von denen wir bis heute wissen, dass wir diese noch nicht perfekt genug beherrschten und hier andere definitiv besser wäre. | ||||||||||||||||||||
|
|||||||||||||||||||||
|
|||||||||||||||||||||
|
|||||||||||||||||||||
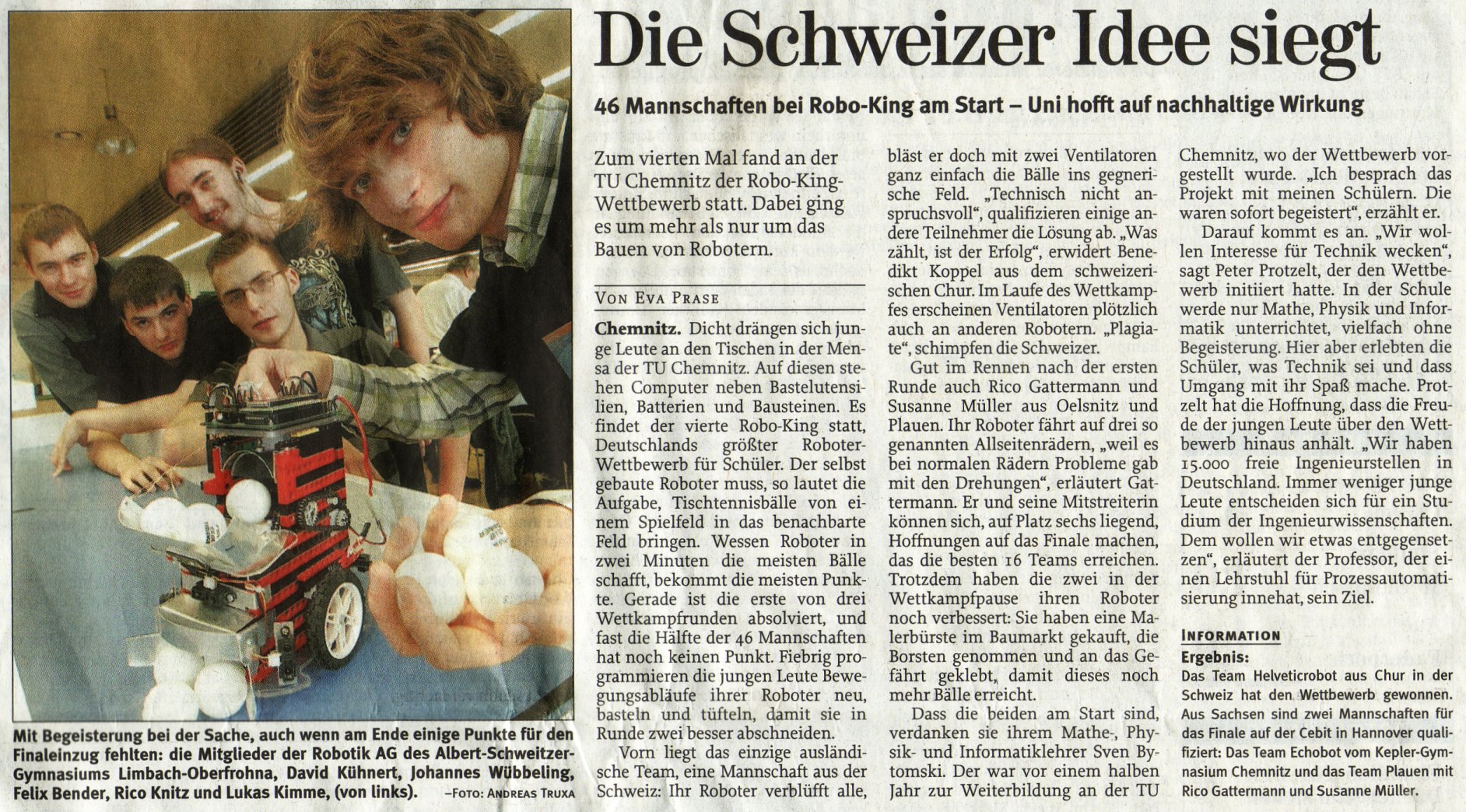
Der Roboking-Wettbewerb - die Presstimmen
|
|||||||||||||||||||||
| 4. Roboking-Vorrunden-Wettkampf in Chemnitz |
|
|
|
|
|
Der Start war in sofern einfach, als das wir uns lediglich termingerecht zu melden hatten sowie in einer Zwischendokumentation unsere Lösungsstrategie beschreiben mussten. Aber dann wurde es ernst, nämlich mit sauberen mechanischen sowie softwaretechnischen Lösungen, von denen wir bis heute wissen, dass wir diese noch nicht perfekt genug beherrschten und hier andere definitiv besser wäre. | ||
|
| 5. Roboking-Vorrunden-Wettkampf in Chemnitz |
|
|
|
|
|
Die Vorbereitungen liefen eigentlich organisatorisch katastrophal - jeder Manager hätte bei solchen Mitarbeitern das Handtuch geworfen - alle waren immer nicht da! Allerdings ist dann innerhalb kürzester Zeit noch was brauchbareres heraus gekommen, das heißt, wenn man gemerkt hätte, dass da schon wahrscheinlich seit längerer Zeit entscheidende Dinge kaputt waren. Hat man aber nicht gemerkt - konnte es gar nicht merken! Und die Rache folgte auf der CeBit als dann klar wurde, dass einer der Radencoder definitiv defekt war. Dann war mitten in den Wertungsläufen Improvisation gefragt und | ||
|
| 6. Verwandte Themen |
|
|
|
|
|
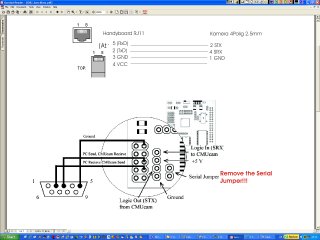
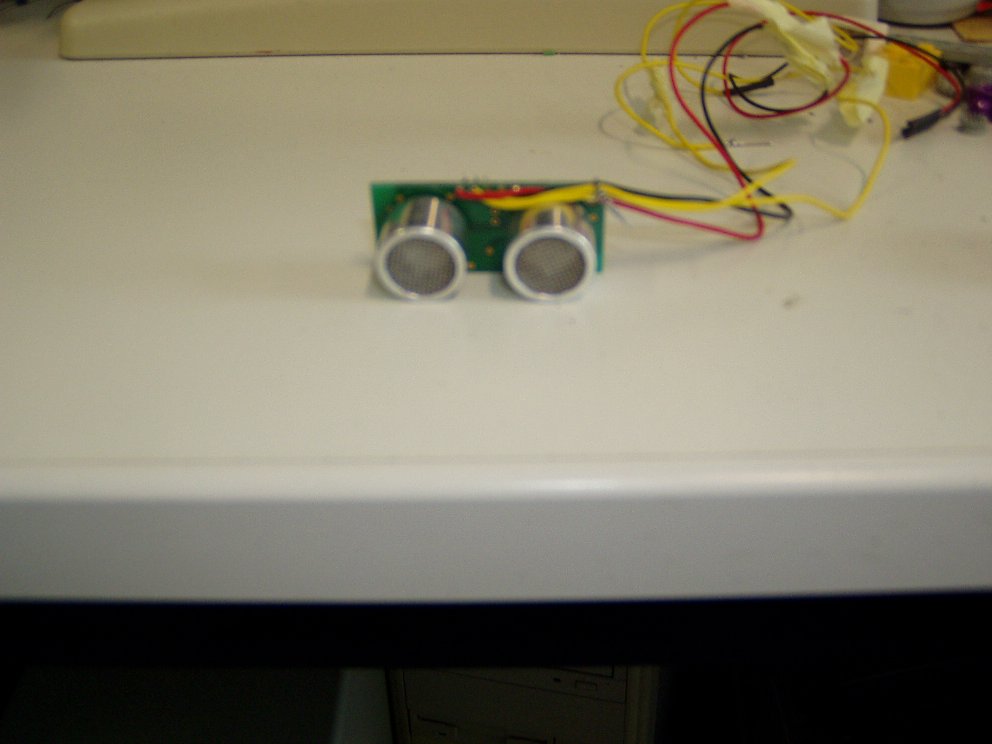
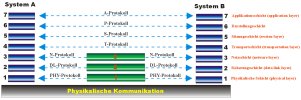
Da unsere Roboter ganz furchtbar viel mit Elektronik, Stromversorgung, Logik, Sensorik, Aktorik und Signalwandlung, aber auch mit Microcontrollern sowie deren Programmierung zu tun haben, können wir hier nun rein theoretisch auf fast jeden Bereich der Informatik verlinken und werden garantiert fündig. Selbst einen Datenübertragung via Schnittstellen ist erforderlich. |
||||||
Bereich Stromversorgung |
|||||||
Bereich elektronische Bauelemente |
|||||||
Bereich Mikroprozessor-Technik |
|||||||
Bereich Logik |
|||||||
Bereich Microcomputer und Microcontroller |
|||||||
Bereich Programmierung |
|||||||
Bereich Robotertechnik |
|||||||
Bereich Datenkommunikation |
|||||||
|
|
Bereich Rechentechnik und Betriebssysteme |
|
zur Hauptseite |
© Samuel-von-Pufendorf-Gymnasium Flöha | © Frank Rost am 3. November 2010 um 17.23 Uhr |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) „Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei „f“!“ Diddi Hallervorden, dt. Komiker und Kabarettist |
|
Diese Seite wurde ohne Zusatz irgendwelcher Konversationsstoffe erstellt ;-) |