| Das Projekt "Rabbi Loew" 2005/06 - nach dem sagenumwobenen "Vater" des Golems zu Prag |
|
|
Letztmalig dran rumgefummelt: 03.12.06 17:50:35 |
|
|
... soll uns den weiteren Vorstoß in
Naturwissenschaft und Technik erleichtern bzw. überhaupt erst einmal
ermöglichen. Hier wollen wir Elektronik und
Mechanik sowie Meßtechnik miteinander verbinden und dem Gymnasium das wieder geben, was ihm das offizielle
Bildungsangebot systematisch genommen hat: eine, wenn man so will,
polytechnische Grundbildung. Momentan ist alles mit heißer Nadel gestrickt, ganz einfach deshalb, weil schon der Bewerbungstermin, aber auch die Realisierung für uns als Neulinge sehr, sehr eng ist. Aber worum geht es überhaupt? Nun, im Jahre 2005 (bzw. 2006) sollen die Roboter der Schüler um die Wette ein Burg bauen (das ist natürlich eine Simulation von Teilprozessen). |
|
|
|
| 0. Worum es
überhaupt geht - der Roboking-Wettbewerb der TU-Chemnitz ... 1. Die AG mit ihrem Poster und ihren Sponsoren 2. Aufgabe und Arbeitsprogramm 3. Arbeitsinhalte und Verantwortlichkeiten 4. Die Unterlagen 5. Arbeitsberichte und Foto-Gallerie 6. Offizielle Website des Projektes 7. Arbeitsdokumentation mit Stand 28.10.05 17:45 Uhr 8. Arbeitsdokumentation mit Stand 27.11.05 17:45 Uhr 9. Arbeitsdokumentation mit Stand 13.01.06 19:35 Uhr 10. Arbeitsdokumentation mit Stand 20.01.06 18:00 Uhr 11. Technische Details 12. Aufgabenblock der Uni Chemnitz 13. Ausschreibung zum Zwischenwettbewerb 14. Zwischenwettbewerb vom 20.01.06 bis 22.01.06 in Erfurt 15. Pressestimmen über die Zeit ;-) 16. Februar 2006: Zeit für GOLEM II 17. Endrunde des Roboking-Wettbewerbs 2006 in Hannover - "Digital-Living" im Rahmen der CBIT 18. Verwandte Themen |
|
Teilnehmer:
Betereuer: |
|
| der Robo-King-Wettbewerb der TU-Chemnitz - oder aber auch der Robo-Race-Wettbewerb der Firma Krause aus Halle - unser großes Ziel | |
| Schüler der Robotik-AG des des Gymnasiums in Limbach-Oberfrohna setzen derzeit die Maßstäbe - und wir sind gewillt, die Herausforderung anzunehmen - sie arbeiten mit dem Handy-Board der Firma Krause Elektronik | |
| ... und wenn wir mal groß sind, nehmen wir hier teil :-) | |
dies sind weitere Roboter-Bastler:
|
|
| ... wer uns jetzt vorwirft, dass dieser oder jener Link nicht funktioniert, der sei darüber belehrt, das dies genau das reflektiert, was der DDR zum "Klassensieg" gefehlt hat (wir sehen uns aber trotzdem noch nicht zum Scheitern verurteilt) - eben "dieses" und "jenes" ;-) | |
| ... wir alle arbeiten einfach an vielen Projekten - dies aber gern ;-) |
| 1. Die AG mit Poster und ihren Sponsoren |
|
|
|
|
|
Unsere AG hat sich im Mai 2005 gegründet. Das Ziel ist die mehr oder weniger erfolgreiche Teilnahme am Robo-King- Wettbewerb, welcher von der TU-Chemnitz ins Leben gerufen und jährlich ausgetragen wird. |
| Projekt "Rabbi Loew" - so der vorläufige Arbeitsname, bis wir evtl. etwas besseres gefunden haben - oder aber: der Name bleibt! Anmerkung mit Stand Oktober 2005: der Name bleibt!!! | |
Unsere Sponsoren sind:
den Entwurf unseres Sponsoren-Vertrages findet man hier |
|
| Das Poster ist im Entstehen - wir haben den Arbeitsstand 16.11.05 (eigentlich ein Feiertag in Sachsen - dies gilt aber eben nicht für Roboterbastler) | |
Arbeitsfelder mit Schwerpunktcharakter sind:
Das trifft man natürlich nicht alles auf ein mal und sofort an, aber irgend wann wirst Du für eine Firma die Zeichnung Deiner Gedanken entwickeln und wirst evtl. unter Schmerzen das Prinzip der Eindeutigkeit sowie Verbindlichkeit von Aussagen in der Wirtschaft erlernen müssen. Genau das machen wir hier schon mal ;-) |
|
|
| 2. Aufgabe und Arbeitsprogramm |
|
|
|
|
|
Um überhaupt erst einmal mehr als einen guten Vorsatz zu haben, besuchten wir Ende September die Konkurrenz in Limbach-Oberfrohna. Dabei ging es nicht um abgucken (das geht sowieso nicht, selbst wenn man das fertige Modell sieht), sondern um Verfahrensfragen und einige Tricks in der Organisation. Danke nach Limbach. | ||||||||
| 2005/06 Es begab sich einmal in längst vergangenen Tagen -
also ungefähr im Juni 2005, dass sich ein Schülerteam des Gymnasiums Flöha
entschied, am Roboking-Wettbewerb 2006 teilzunehmen. An die Herrscher des
Reiches der Mini-Roboter musste dazu ein Bittgesuch gerichtet werden, in
welchem Anliegen und Ziel anzutragen waren. Nach Durchquerung der großen
Zauberwälder mit den Lianen des "Zusagens und Vergessens", des Sprechens der
heiligen der Worte "Ja, Ja - das wird schon ...", "Morgen sicher ..." usw.,
war es dann irgendwann im Oktober 2005 so weit, dass einige Zwerglein über
den eigenen Horizont hinaus in die Welt der Steuerungstechnik, der
Automaten und der Elektronik blicken konnten. |
|||||||||
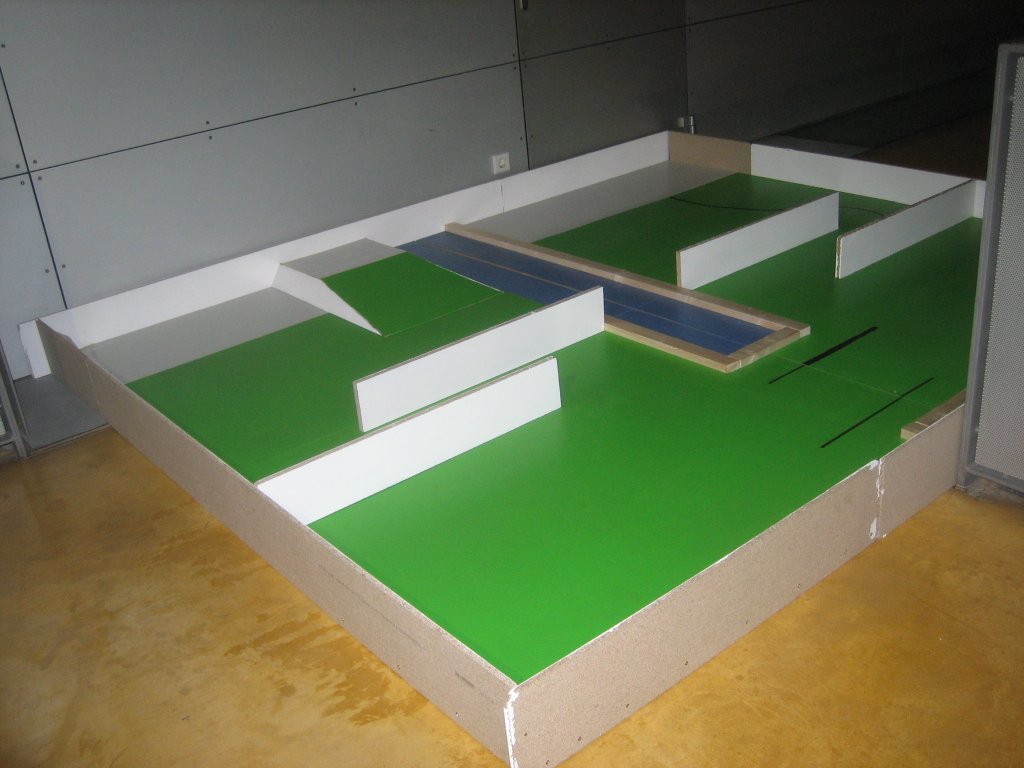
| Der König hat beschlossen, sich eine neue Burg bauen zu lassen. Die
Schatzkammern sind gut gefüllt und aus dem ganzen Land haben sich die
geschicktesten Baumeister beworben. Bevor mit dem Bau der Burg begonnen
werden kann, müssen zunächst die Baumaterialien von einem weit entfernten
Steinbruch zum Bauplatz befördert werden. Der beschwerliche Weg führt durch einen finsteren Wald, eine tiefe Schlucht und über eine schmale Brücke. Wer am Ende die meisten Steine zum Bauplatz gebracht hat, wird königlicher Baumeister und erhält die Belohnung des Königs. Ihr müsst einen Roboter bauen und so programmieren, dass er die auf dem Spielfeld befindliche Ladestation (den Steinbruch) finden und von dort aus die Steine in seine Heimatbasis (den Bauplatz) befördern kann. Auf dem Weg dahin sind zahlreiche Hindernisse zu überwinden. |
|||||||||
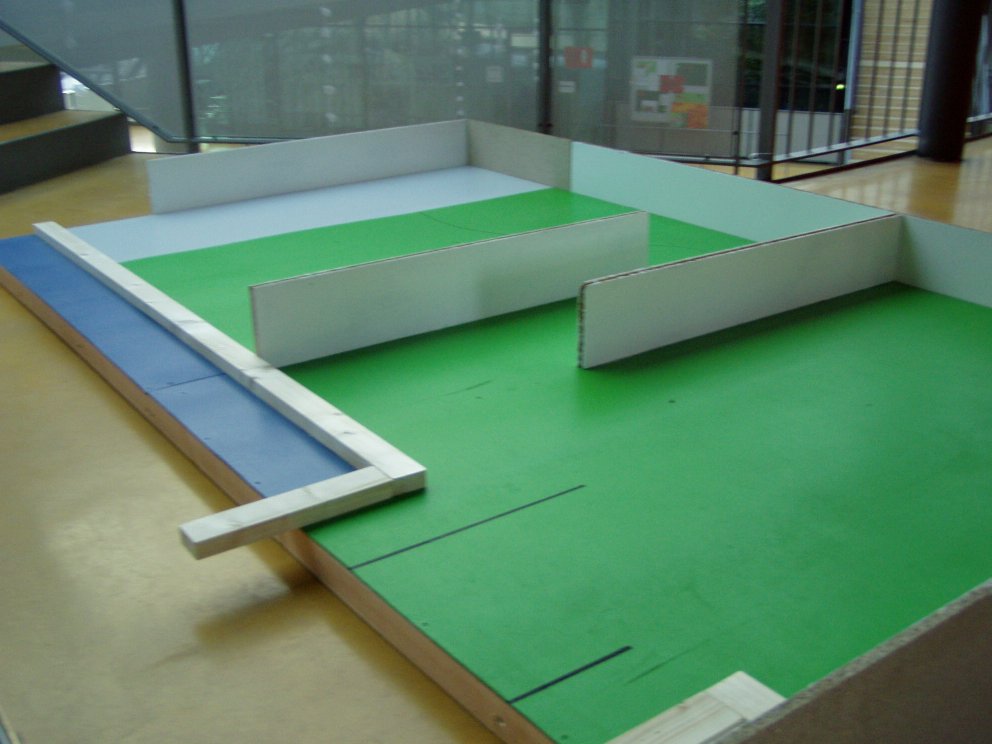
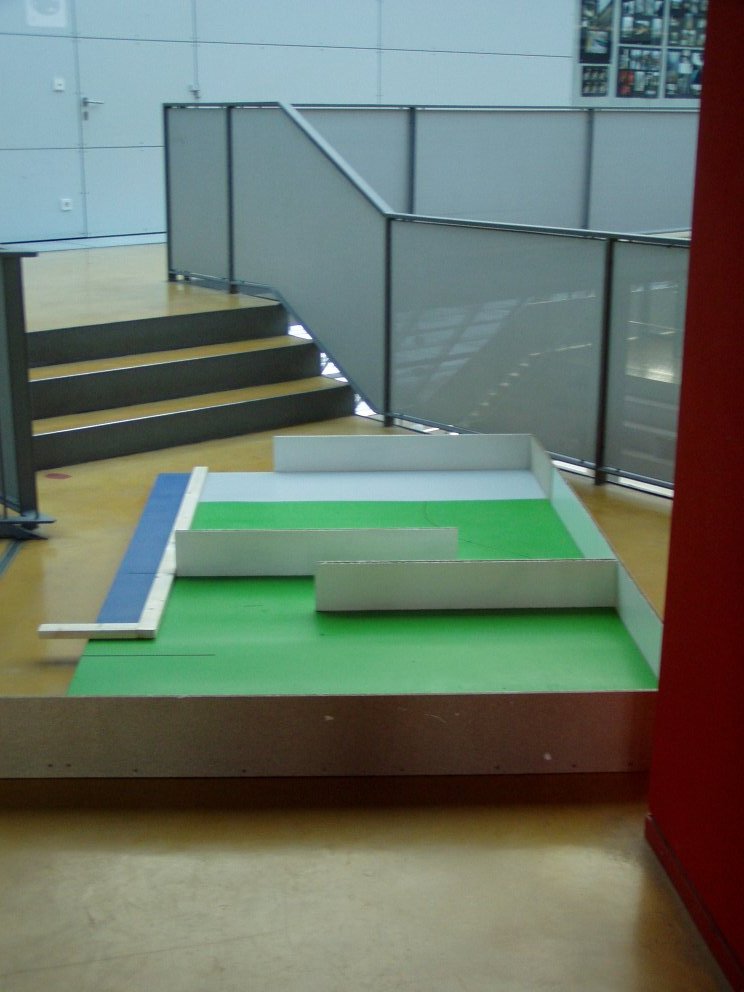
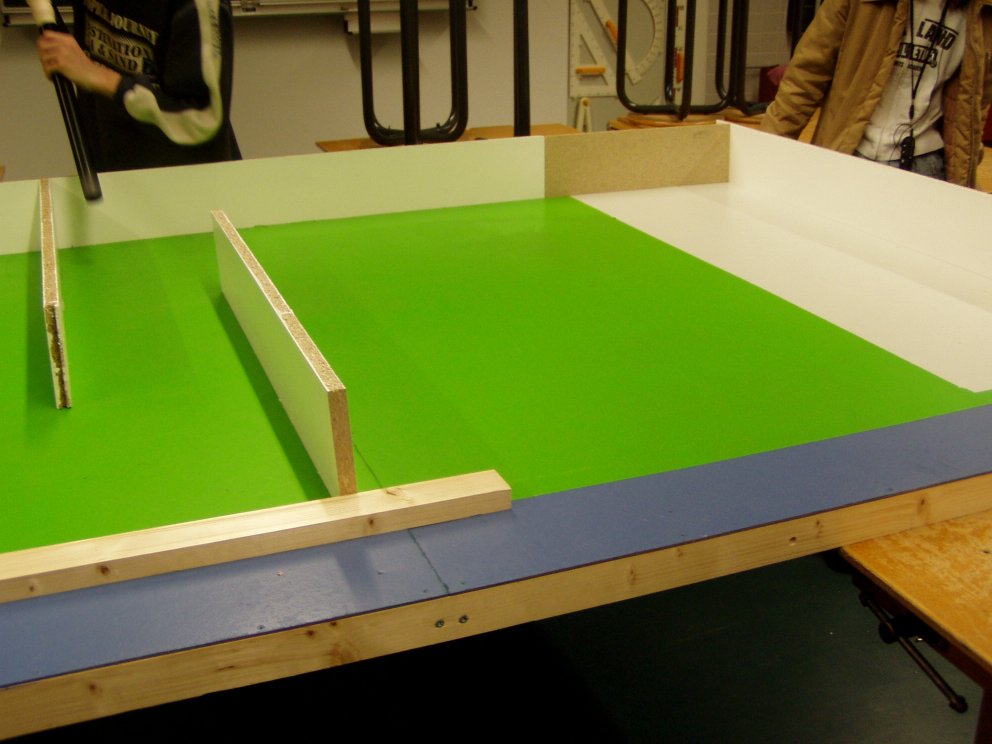
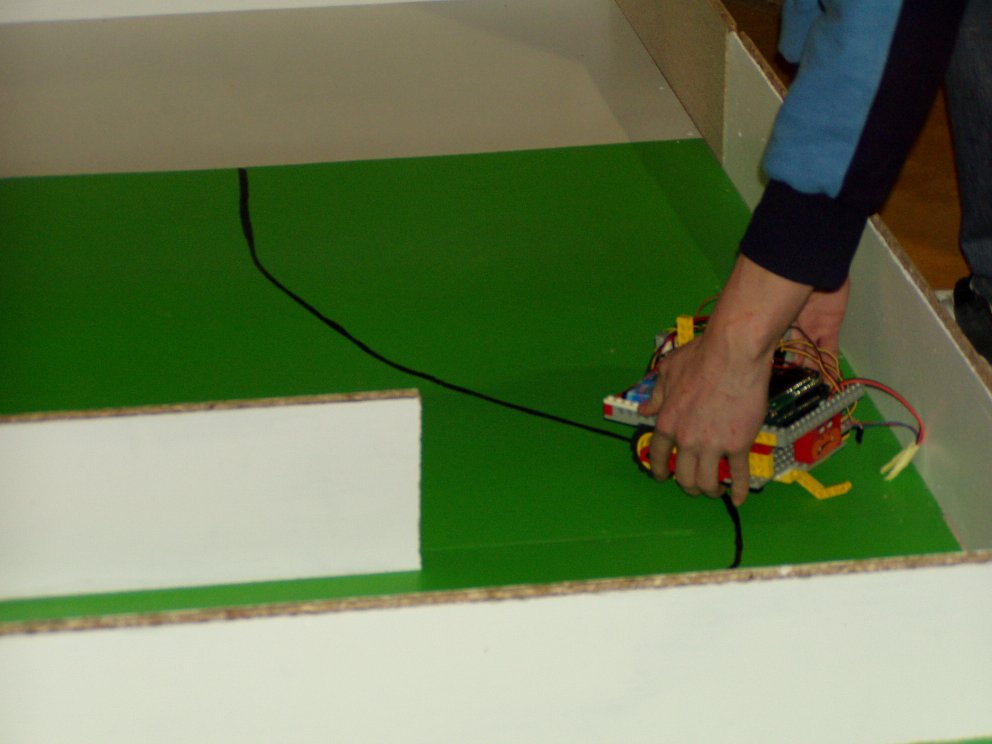
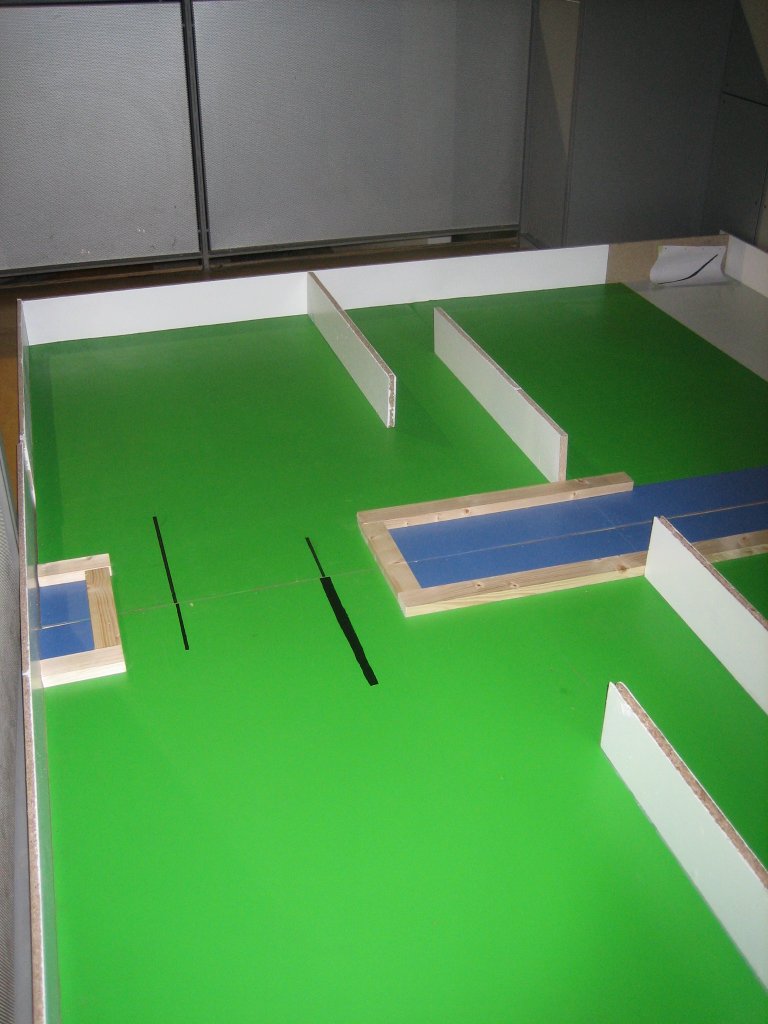
Das Spielfeld für den Wettbewerb 2006
Ableitung der Aufgabenstellung aus dem Spielfeld: Ziel ist es, vom Steinbruch des jeweiligen Teams möglichst viele Steine über den Hindernisparcour und Wechsel der Seiten zur Basis zu befördern.
|
|||||||||
Aufbau eines arbeitsfähigen Teams mit einzelnen ganz spezifischen
Arbeitsgruppen - gebraucht werden:
|
|||||||||
Kennen lernen von Grundstrukturen der Automatisierungstechnik (Steuerung
und Regelung)
|
|||||||||
Was wir tun müssen
|
|||||||||
| 3. Arbeitsinhalte und Verantwortlichkeiten |
|
|
|
|
|
Im folgenden erscheint streng
genommen so etwas wie eine Start-Stopp-Liste. Angefangen haben wir faktisch
(ehe wir eine verbindliche Zusage hatten) im Juni 2005. Dann fassten wir nur
sehr schwer tritt, denn spürbar war: zu einer Sache JA zu sagen ist das
eine, das auch durchzuziehen, das ... ;-) Inzwischen schreiben wir Ende November - der Stamm der Teilnehmer hat sich positiv verändert und ein harter Kern arbeitet regelmäßig. Verstärkung bekommen haben wir durch Johannes (einen exzellenten Techniker und Konstrukteur). Ihm verdanken wir einige nicht ganz unwesentliche konstruktive Ideen - überhaupt liegt der Kern des statischen Modells bei ihm. |
erste Schritte:
Wir, ein Team Technik-interessierter Schüler des Samuel-von-Pufendorf-Gymnasiums, haben zwecks Beteiligung am alljährlich ausgeschriebenen ROBOKING-Wettbwerb eine entsprechende Arbeitsgruppe gebildet. Nun bedarf ein derartiges Projekt einer gewissen Ausstattung, bei deren Beschaffung wir auch Sie um tatkräftige Mithilfe bitten. So ist die Beschaffung von Mechanik- und Elektronik-Experimentiersätzen notwendig. Aber auch mit der zur Verfügungstellung von Arbeitsleistung könnten sie uns heute und zukünftig behilflich sein. So müssen unsere Roboter Grundgestelle aus Plast und/oder Aluminium bekommen. Auch die Herstellung von Leiterplatten und die Beschaffung von elektronischen Bauelementen gestaltet sich ohne finanzielle Reserven faktisch unmöglich. Bedenken Sie bitte auch, dass selbst der kleinste Beitrag uns zur Förderung von Schülern und somit zu einer erfolgreichen Teilnahme an Wettbewerben im deutschsprachigen Raum zu ermöglichen. Selbstverständlich stellen wir Spendenquittungen aus und führen die Logos unserer Sponsoren bei Wettbewerben. Auch der kleinste Geldbetrag hilft uns in der Breite, denn große Projekte haben wir uns vorgenommen:
|
|
zweiter Schritt:
|
|
dritter Schritt:
|
|
| Inzwischen haben wir eine verbindliche Zusage und die erste Bestellung
von Material auch bewältigt ;-)
das war unsere Online-Bestellung bei der Firma Krause Robotik |
|
Arbeitstreffen Herbstferien
|
| 4. Die Bewerbungsunterlagen ... |
|
|
|
|
|
... müssen per 1.7.05 an der TU-Chemnitz eingereicht worden sein. Dazu benötigen wir noch einiges an Materialien - insbesondere aber Ideen. |
||||||
|
|||||||
| und dies ist per 28.6.05 die automatisch generierte Antwort:
Hallo, Vielen Dank für euer Interesse und viele Grüße, |
| 5. Arbeitsberichte und Foto-Gallerie |
|
|
|
|
|
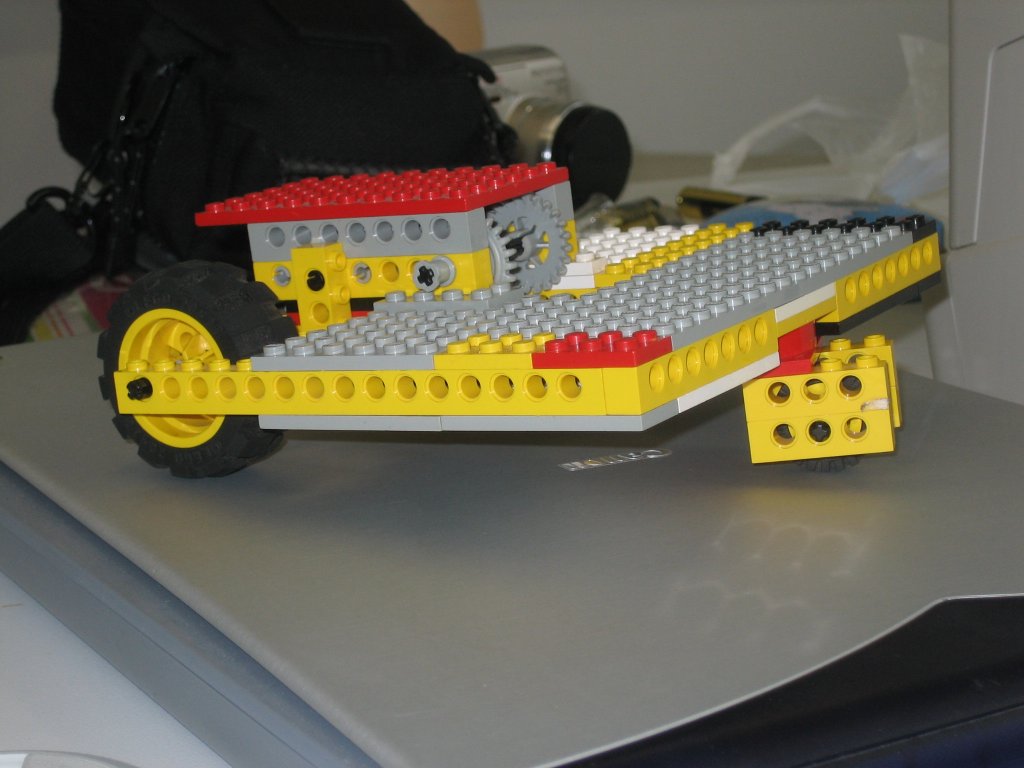
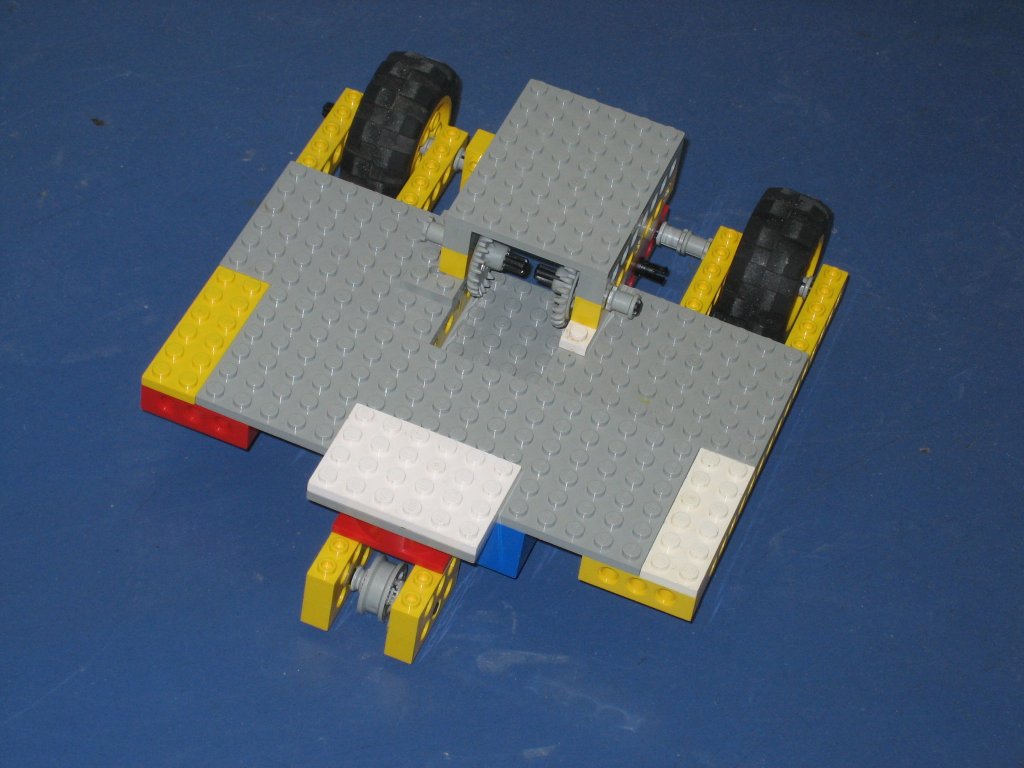
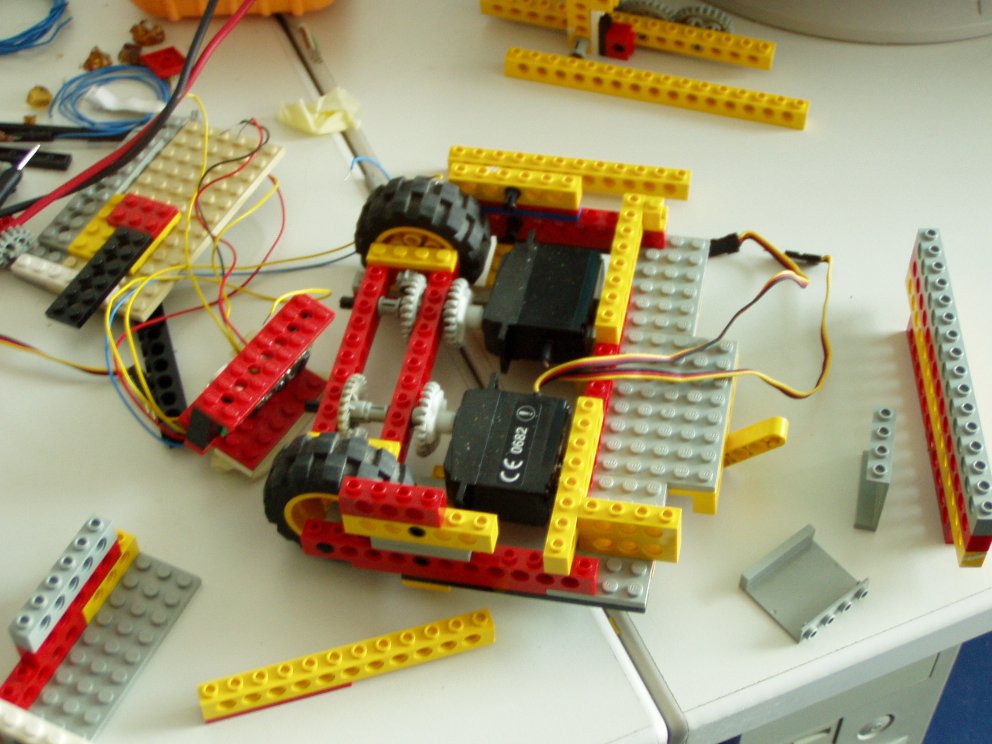
Dies ist der Versuch der Entwicklung einer kleinen Dokumentation, welche ja auch bis zum 30.11.05 an das Roboking-Team an der TU Chemnitz einzureichen ist. Gleichzeitig versuchen wir mit der Foto-Galerie unsere eigenen Zwischenergebnisse bis hin zu einem Gesamtmodell festzuhalten. | ||||||||||||||||||||||||
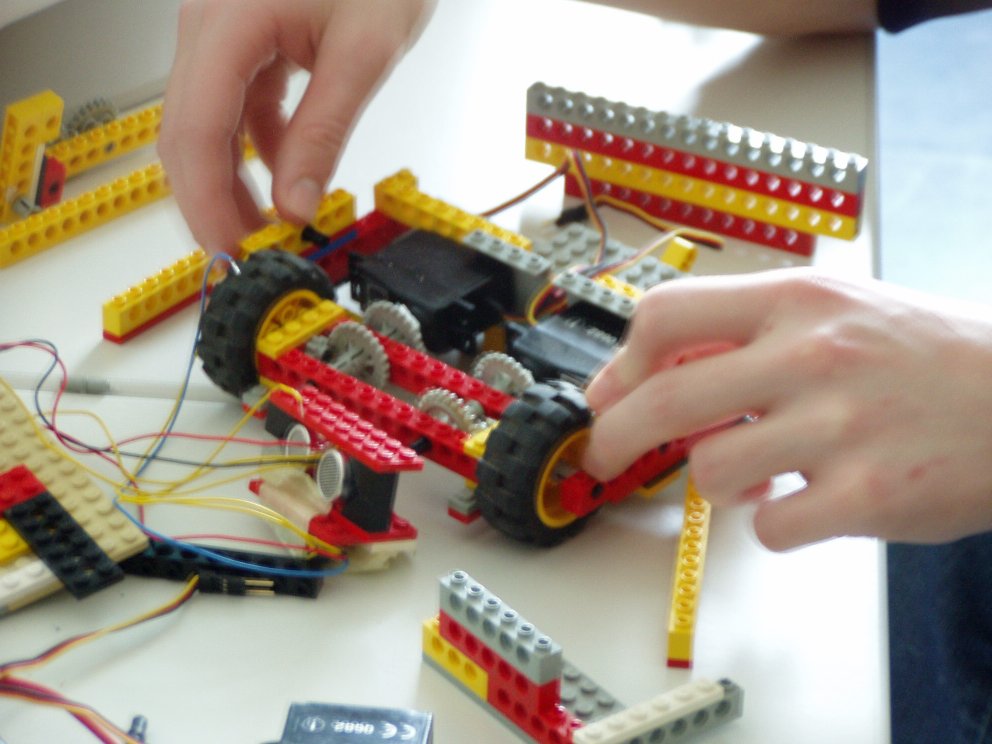
| The early beginnings ... ... aber: das Team hat eigenständig gearbeitet - leider sind einige Vorschläge nicht im Bild erfasst worden
|
|||||||||||||||||||||||||
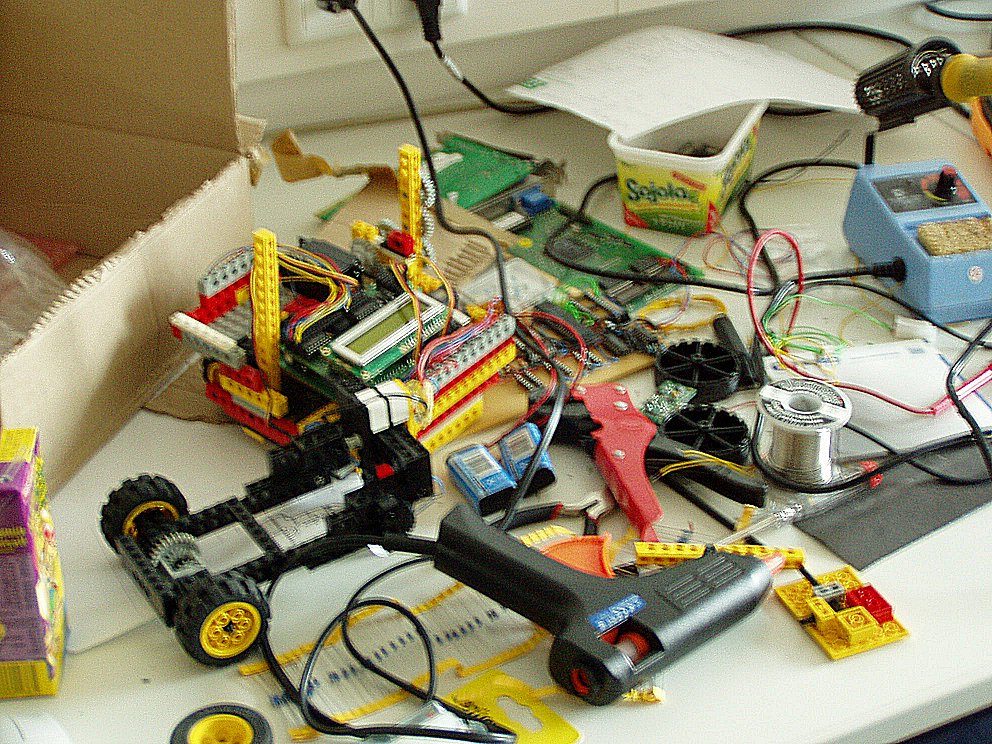
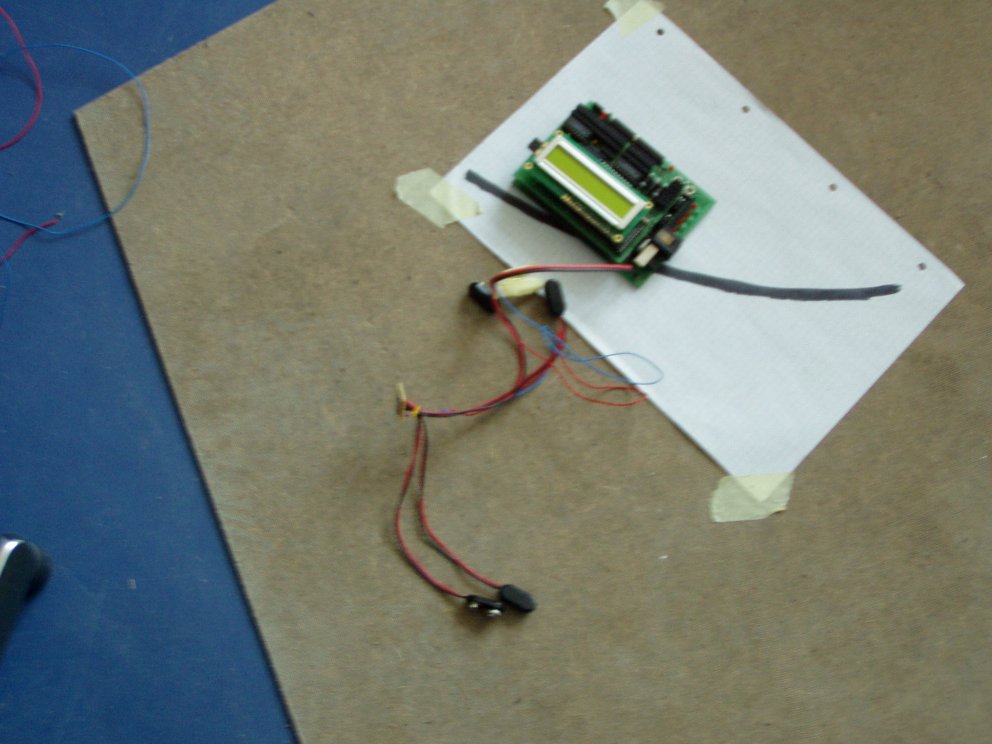
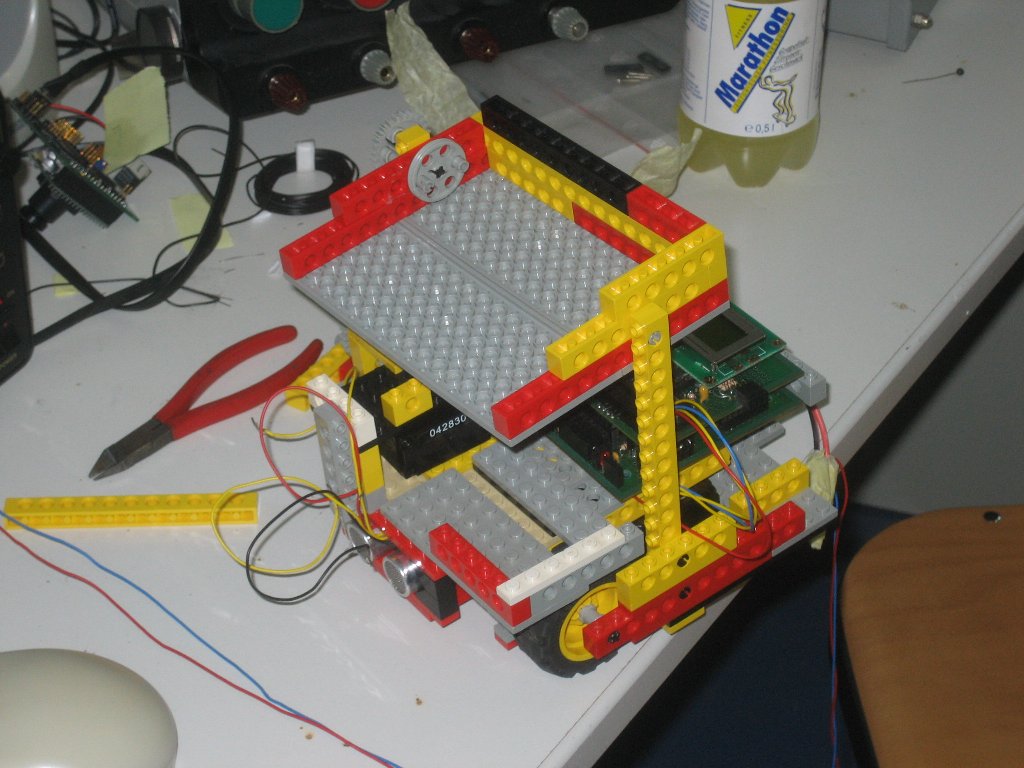
| eng verbunden ist dieses Arbeiten natürlich mit unserer AG selbst sowie
der Aufgabenstellung Arbeitstreffen Herbstferien 2005 (24.10., 26.10 und 28.10.05) - sehr schön kann man drei unserer Arbeitsbereiche sehen
|
|||||||||||||||||||||||||
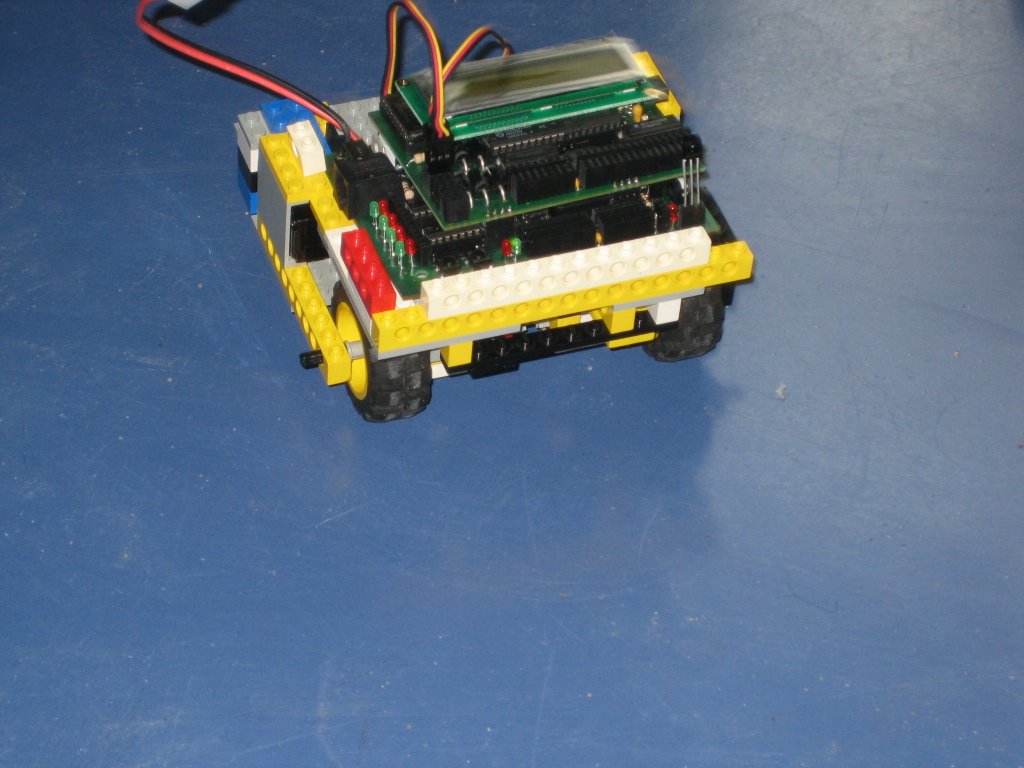
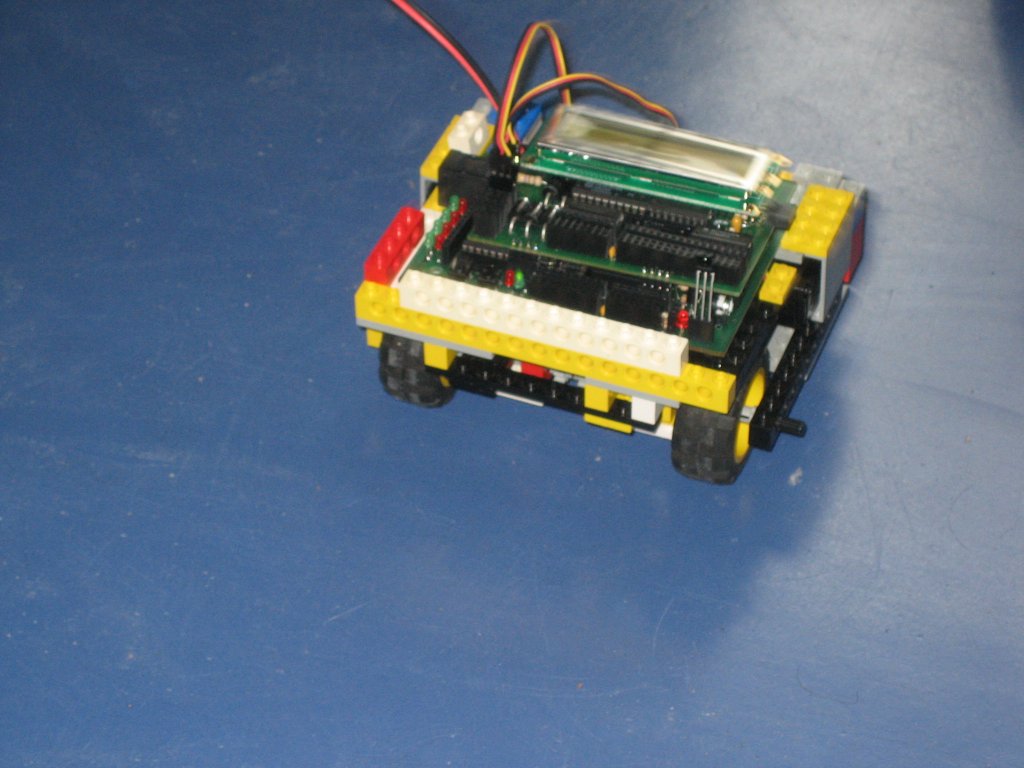
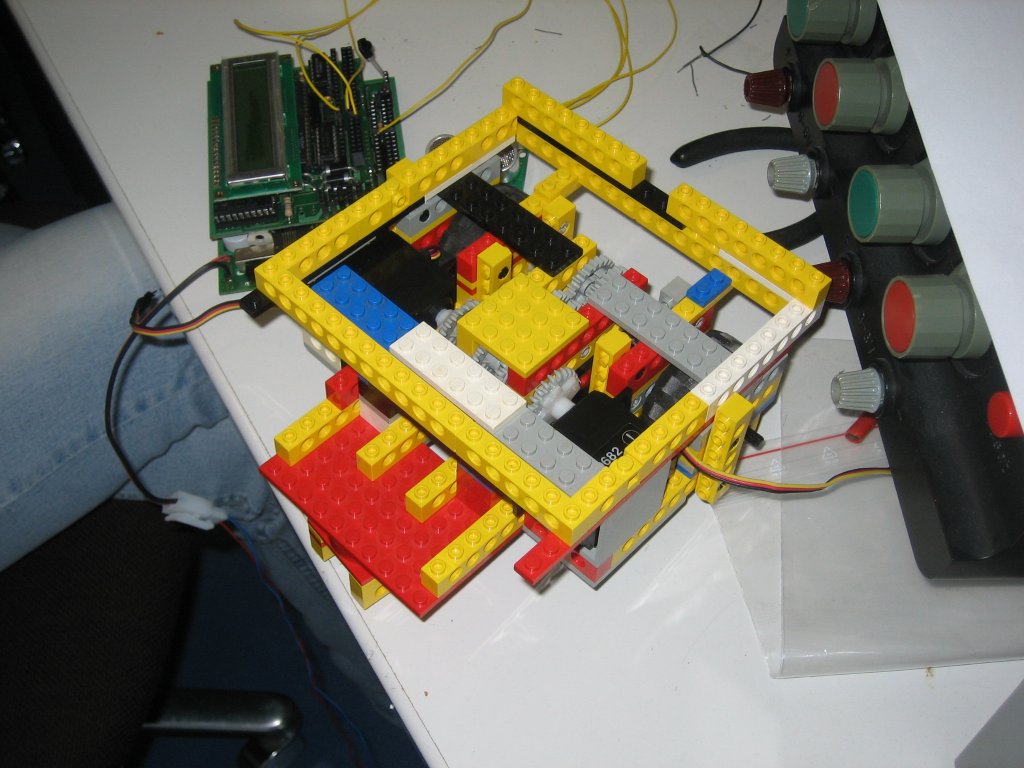
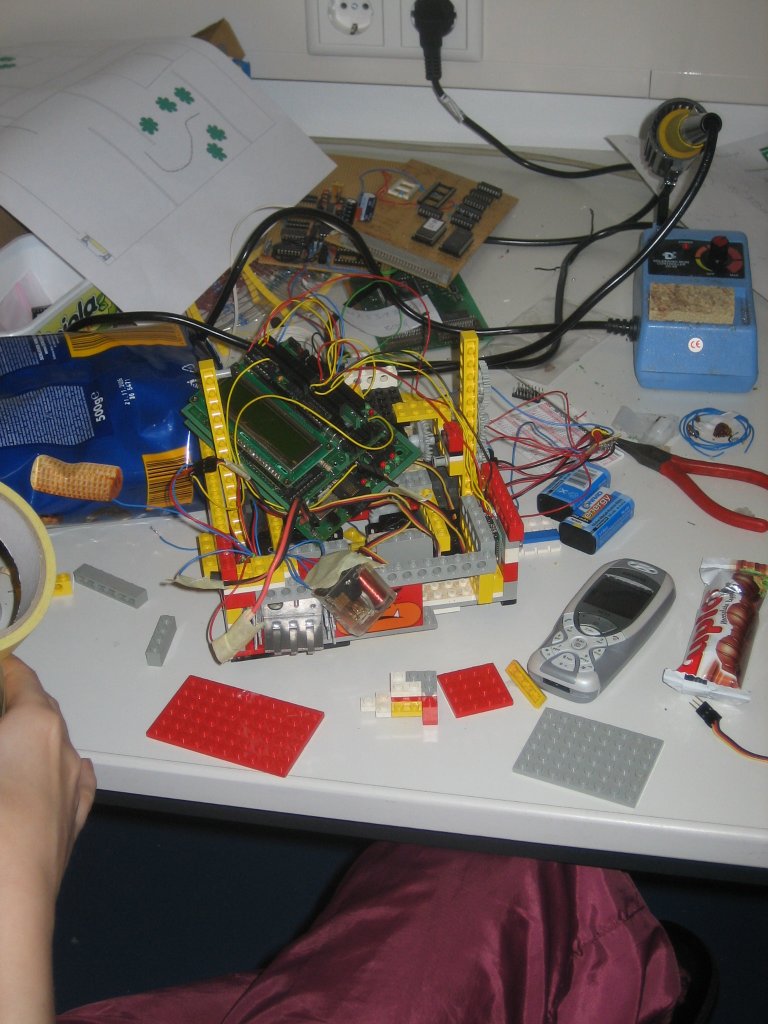
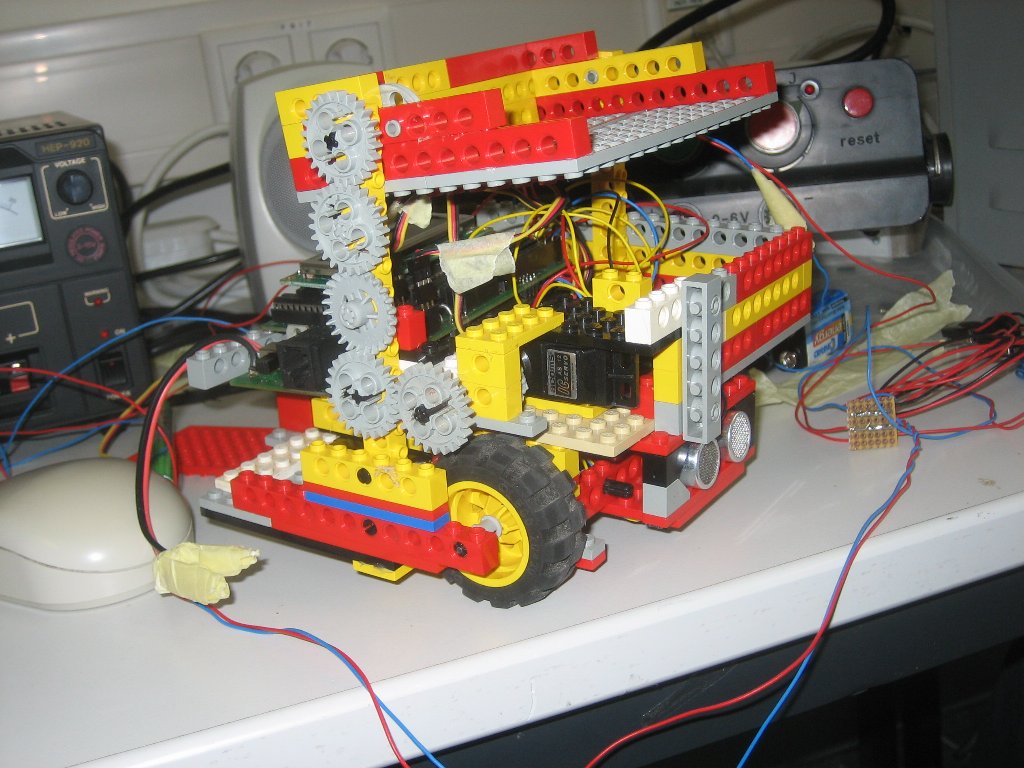
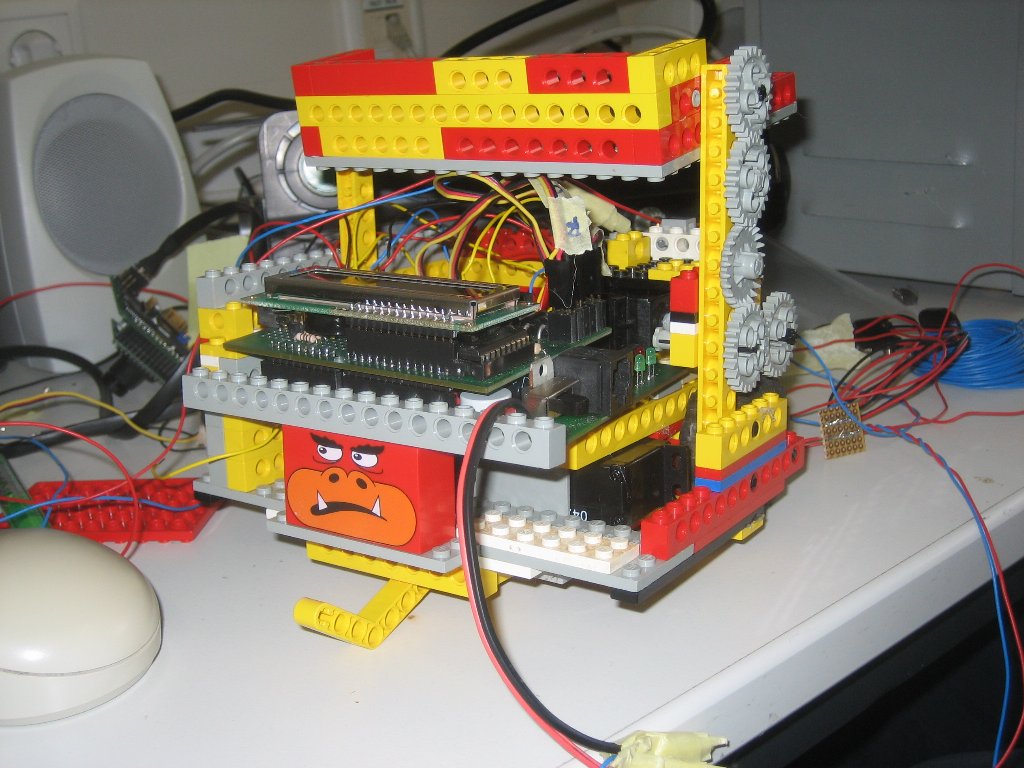
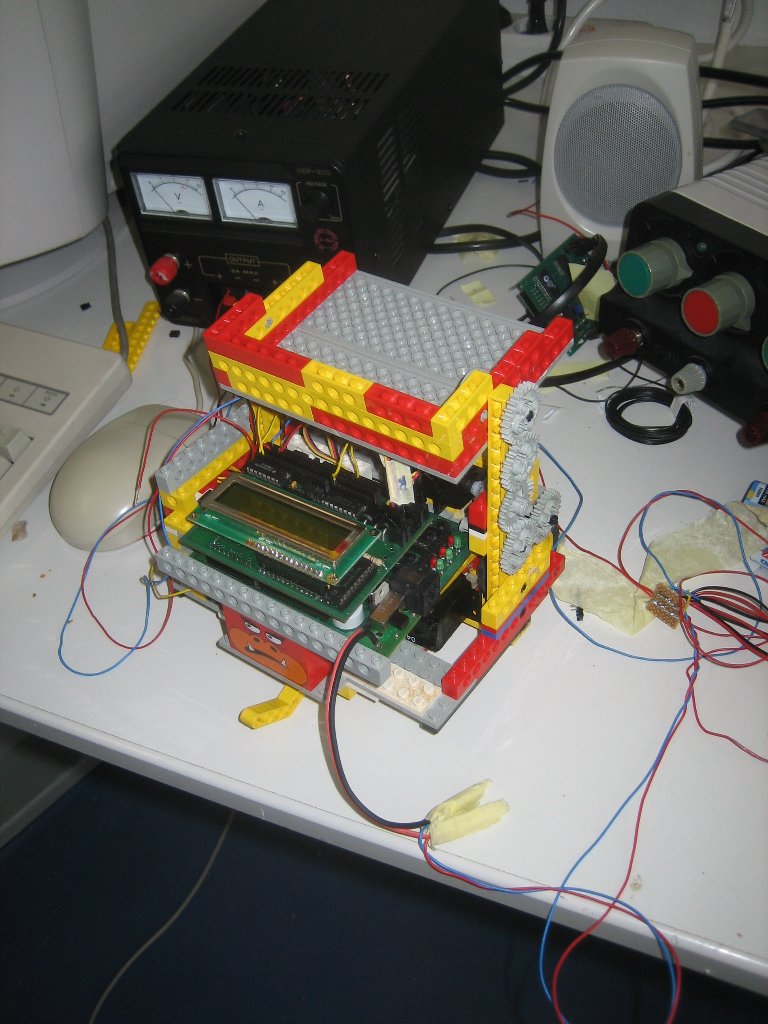
Arbeitsstand 25.11.05 - wir berichten life:
|
|||||||||||||||||||||||||
Arbeitsstand 13.01.06 - wir berichten life:
|
|||||||||||||||||||||||||
Arbeitsstand 20.01.06 - wir berichten life:
|
|||||||||||||||||||||||||
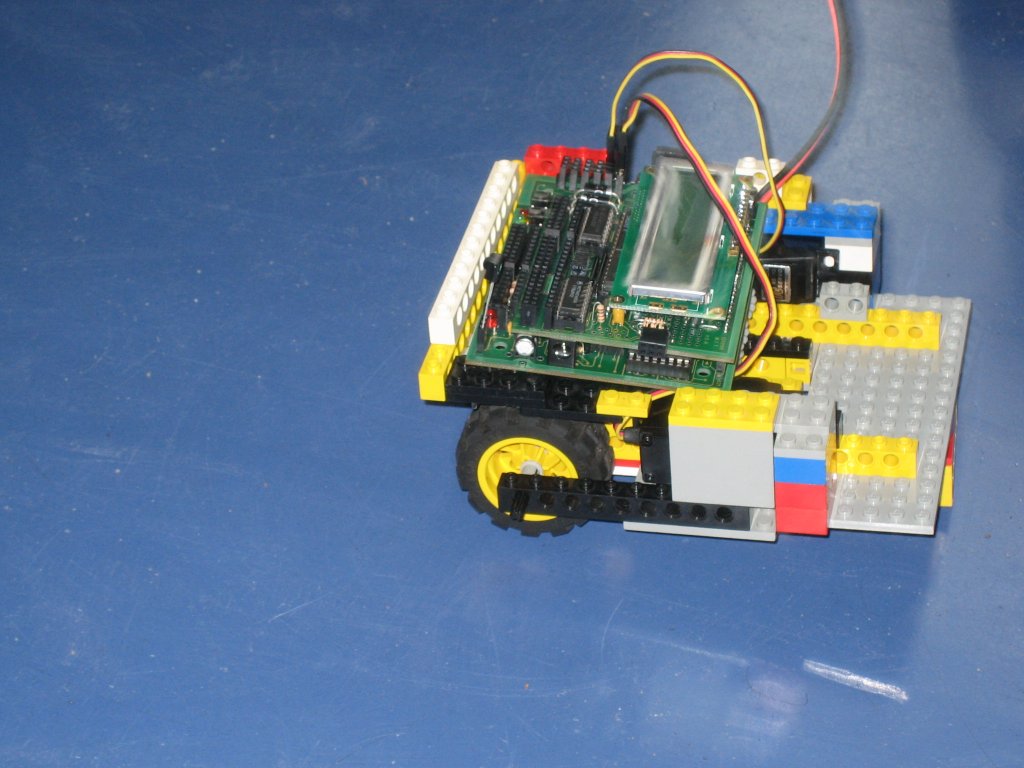
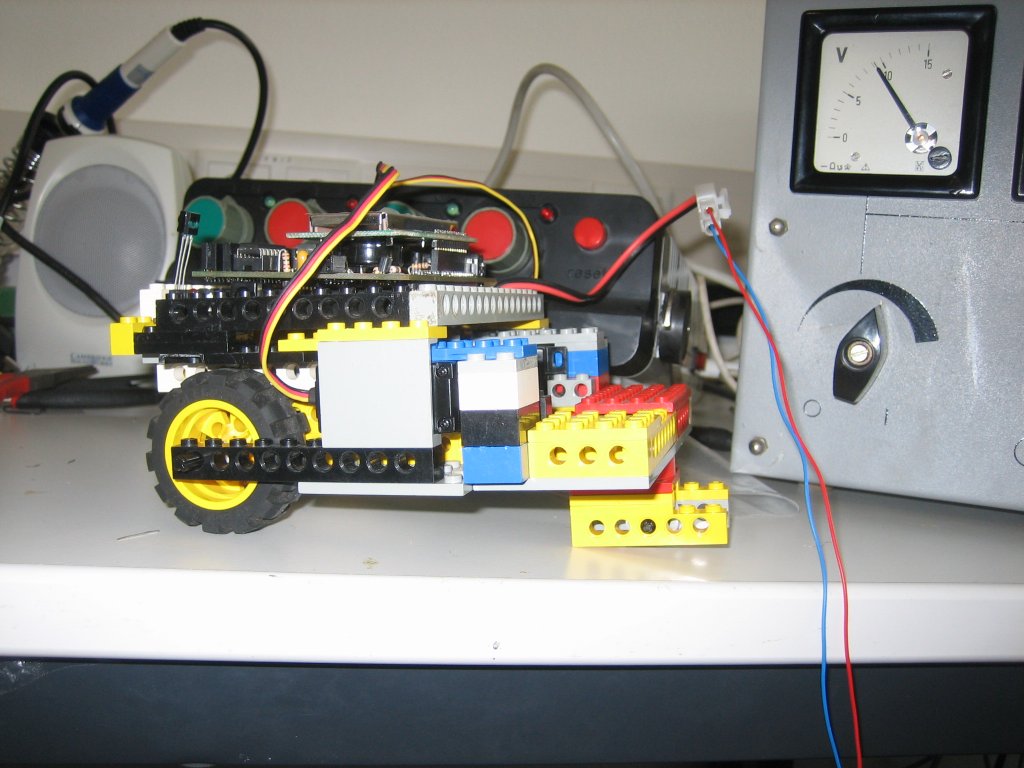
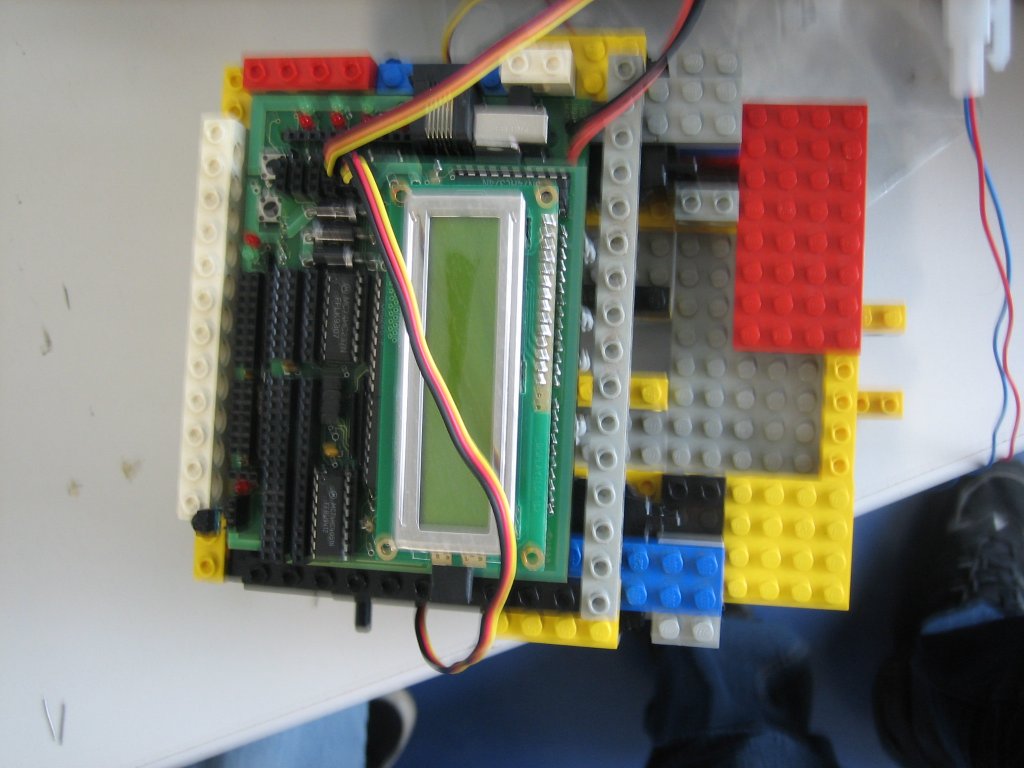
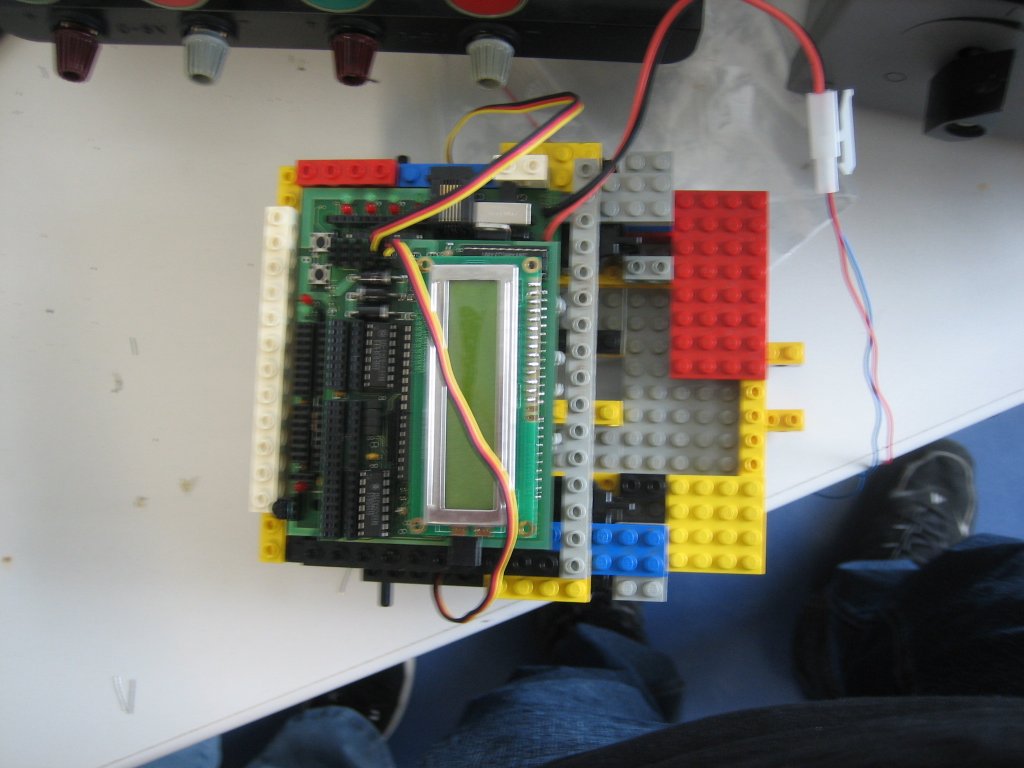
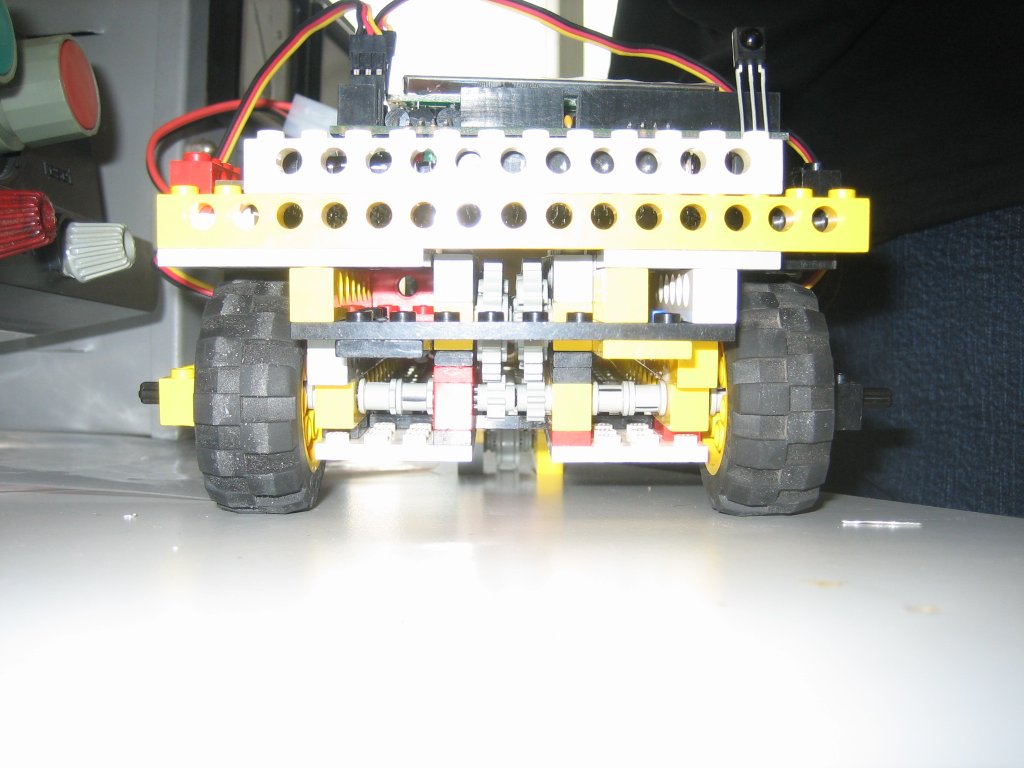
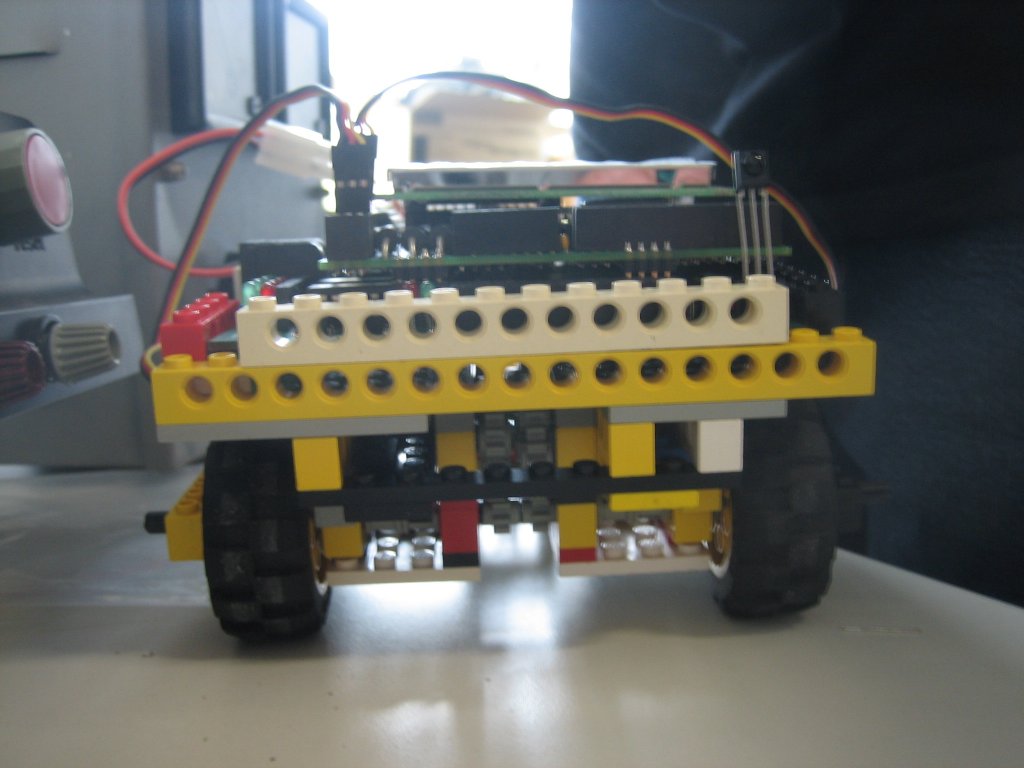
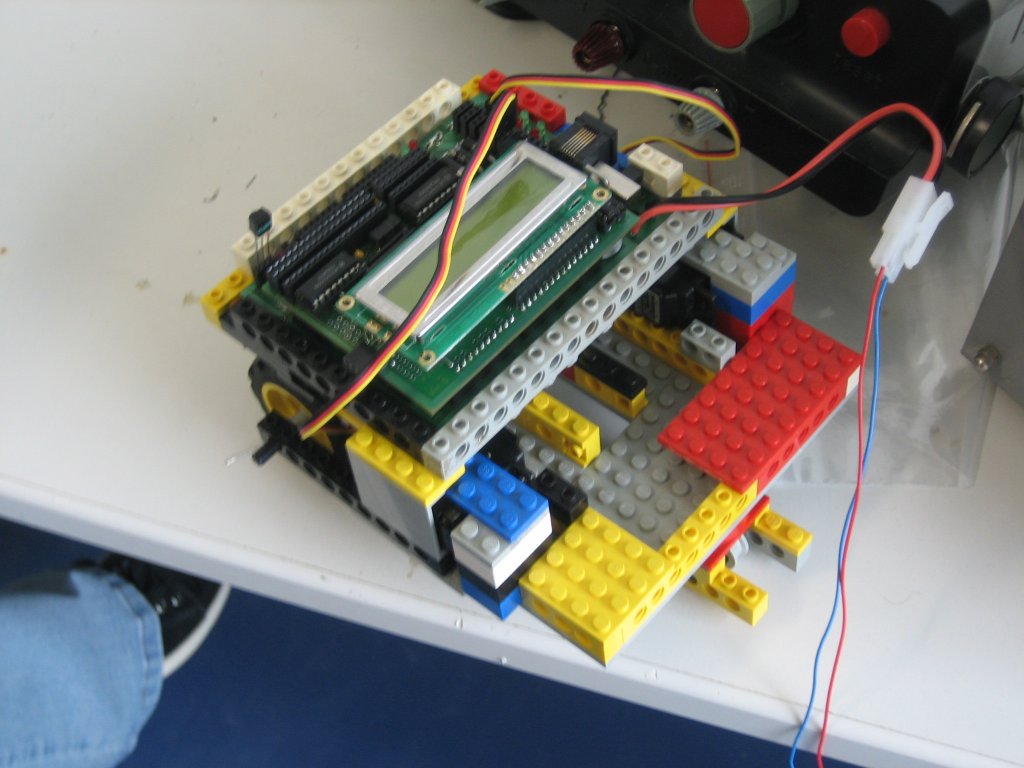
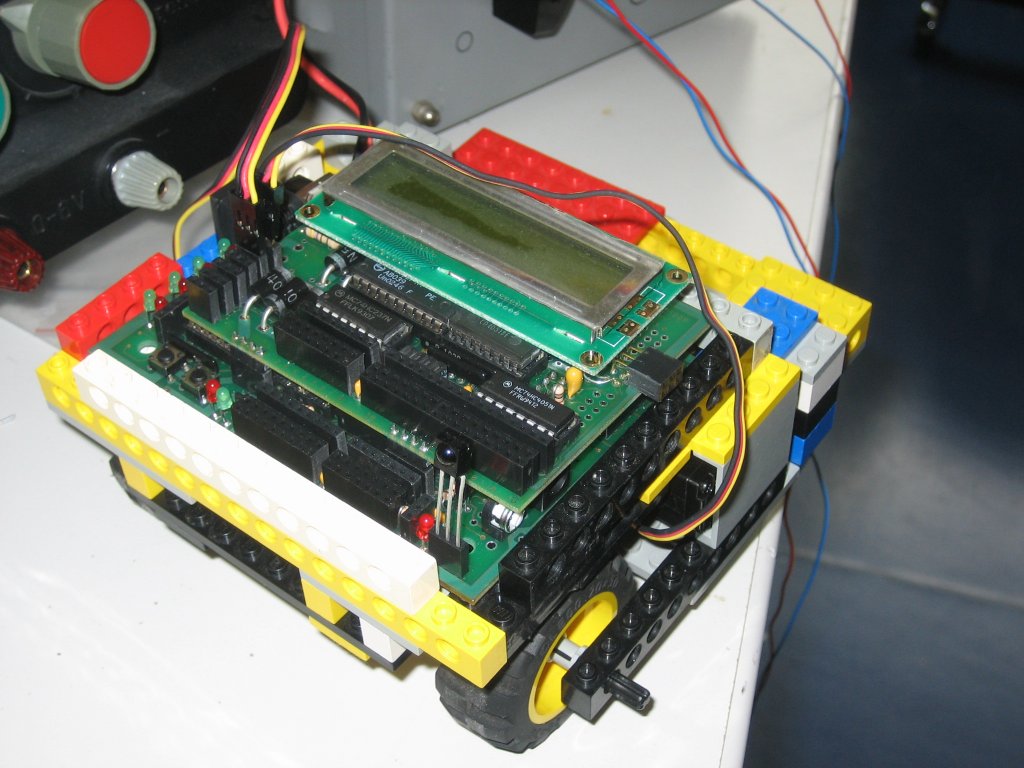
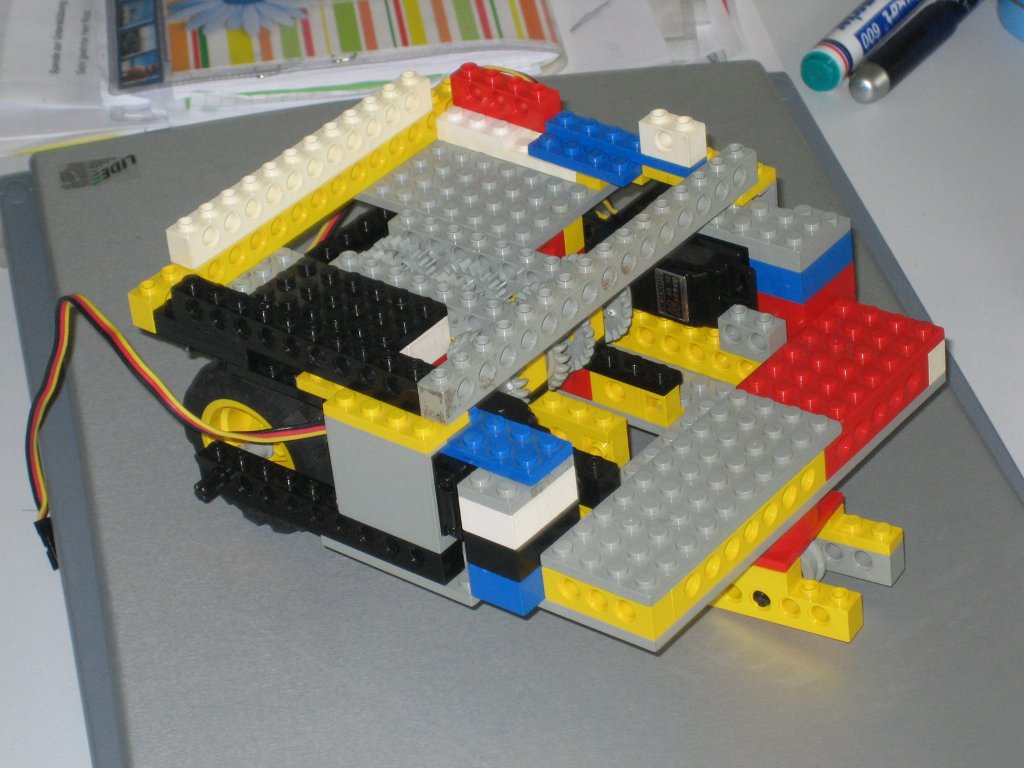
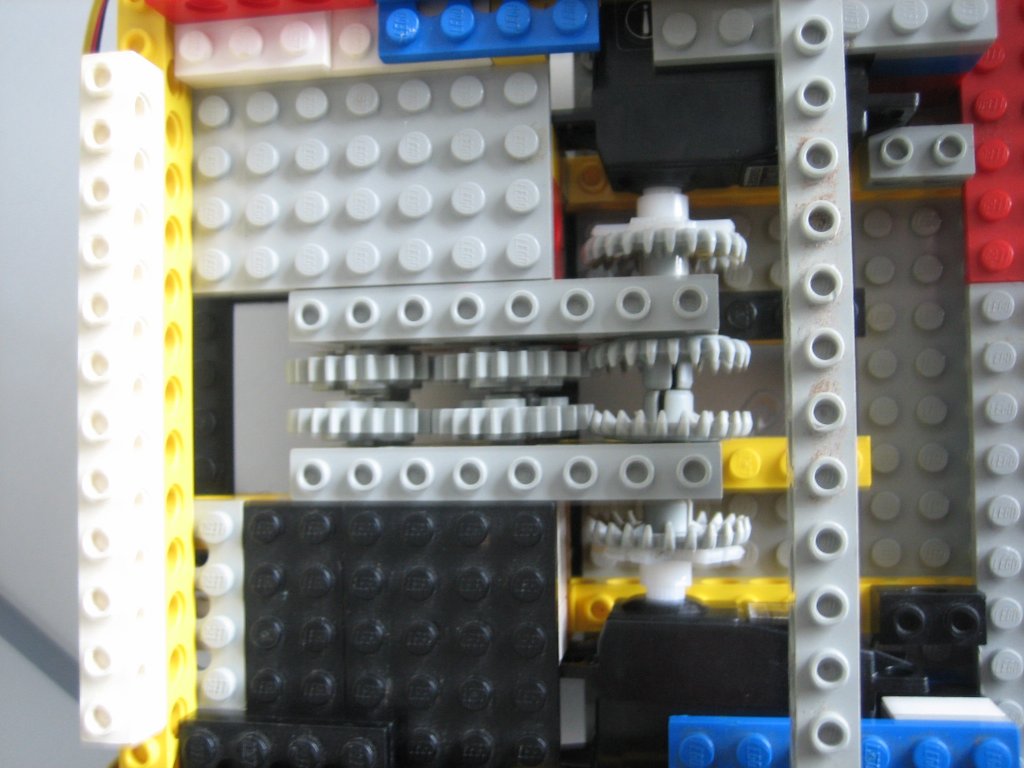
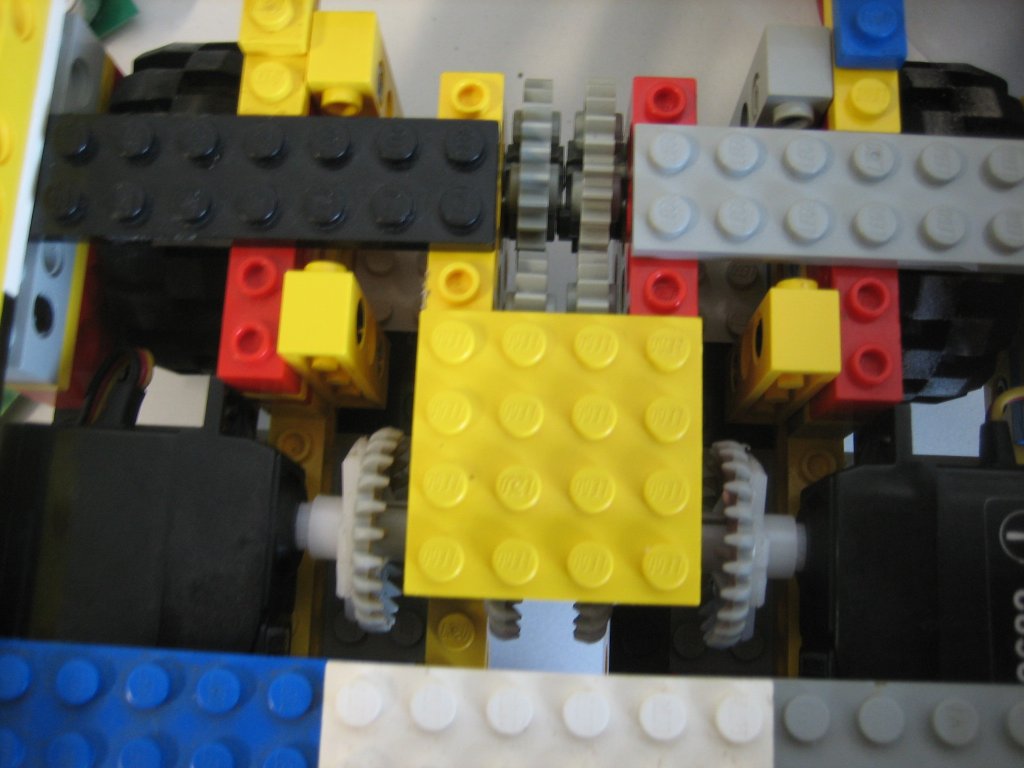
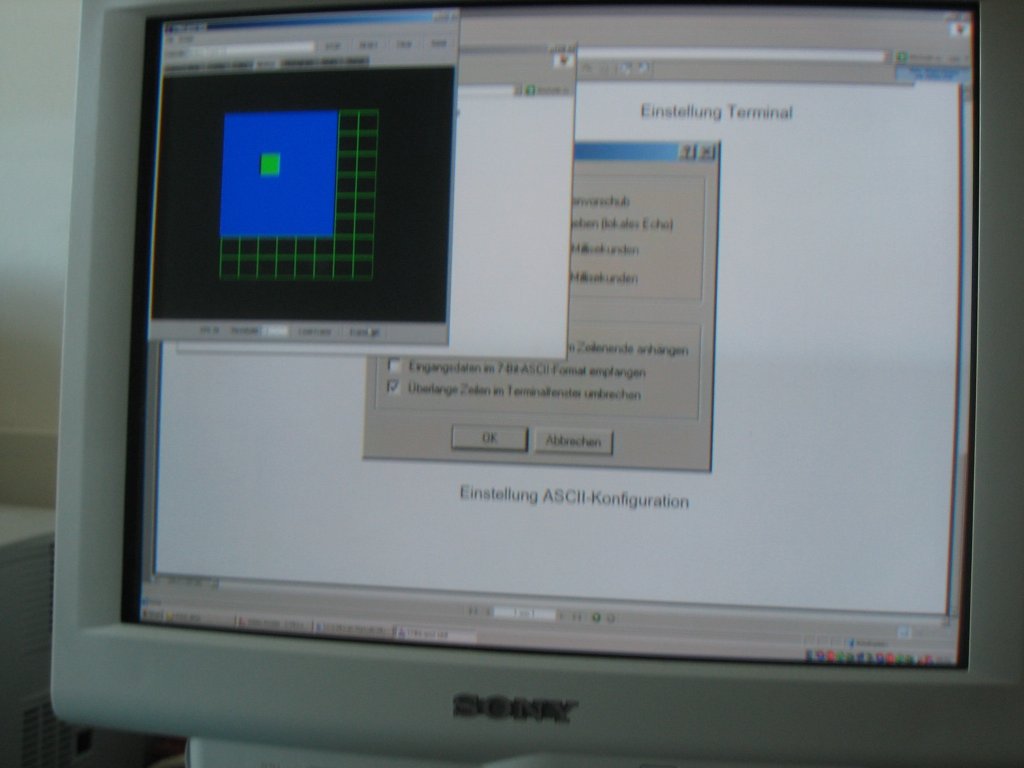
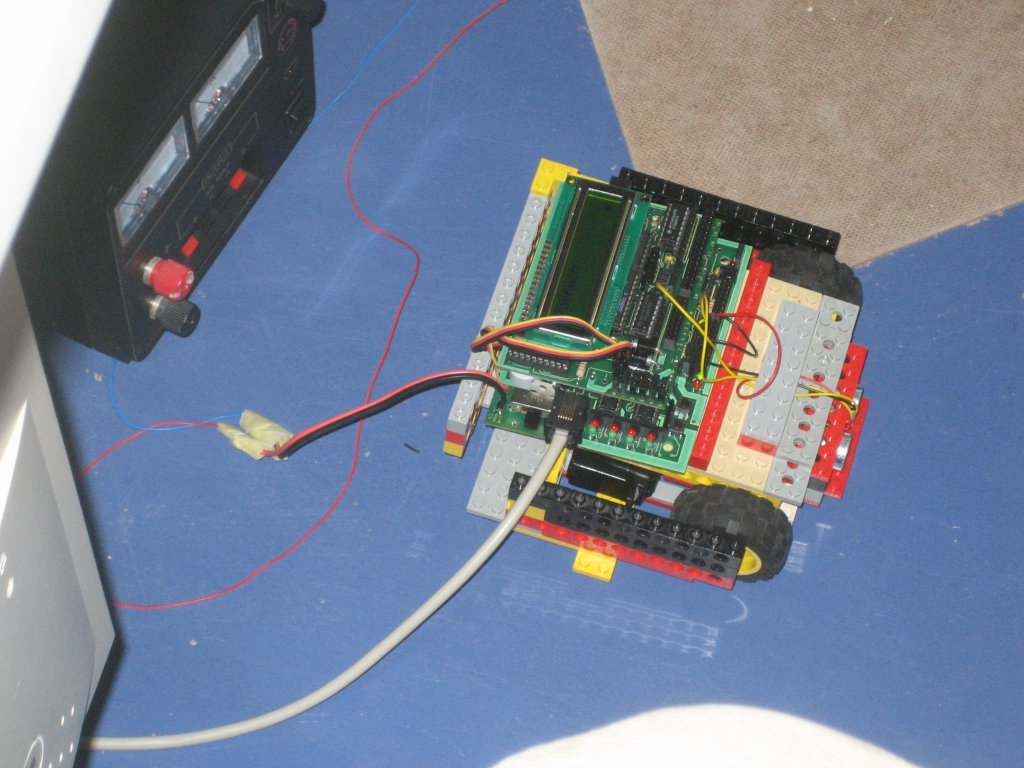
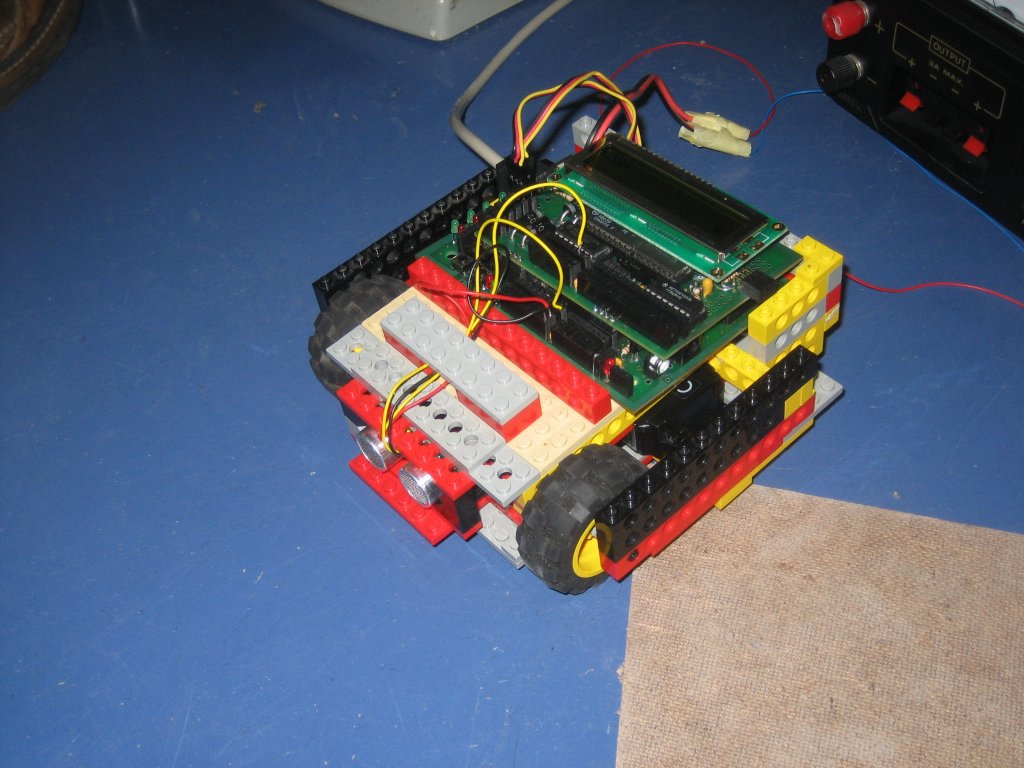
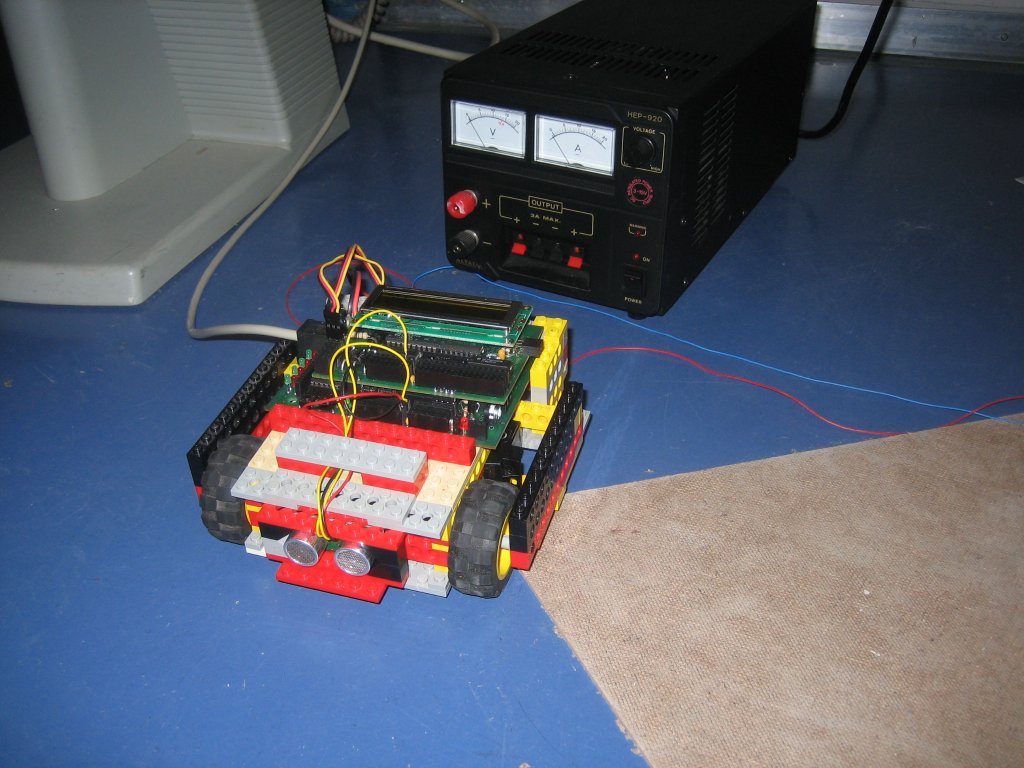
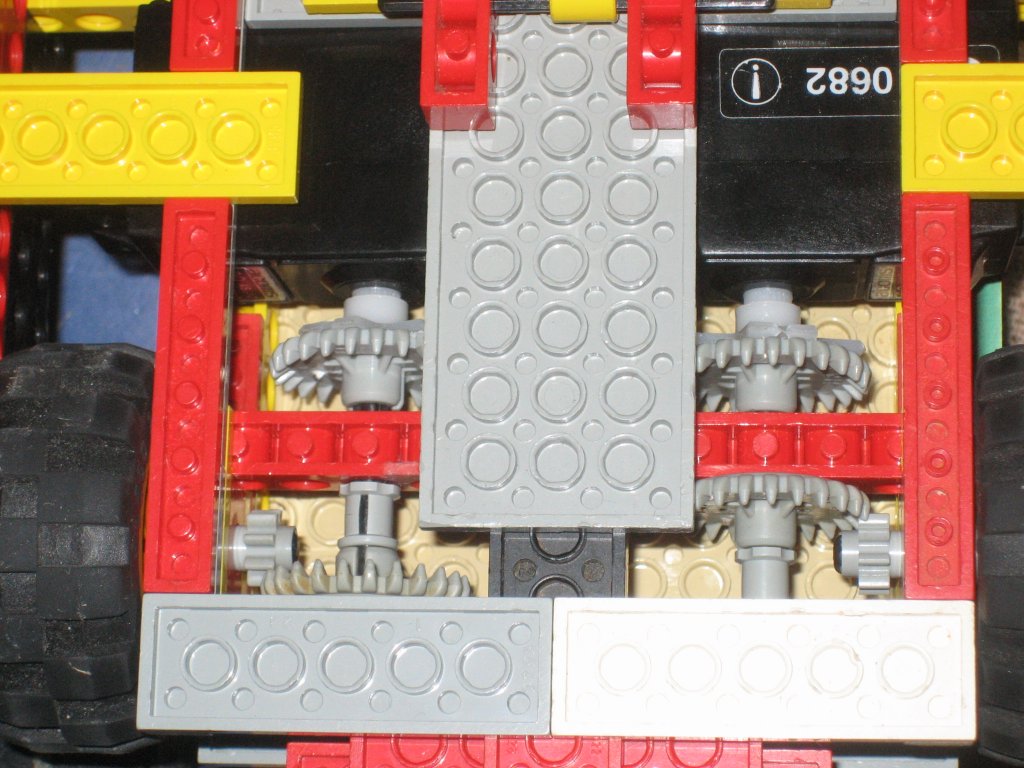
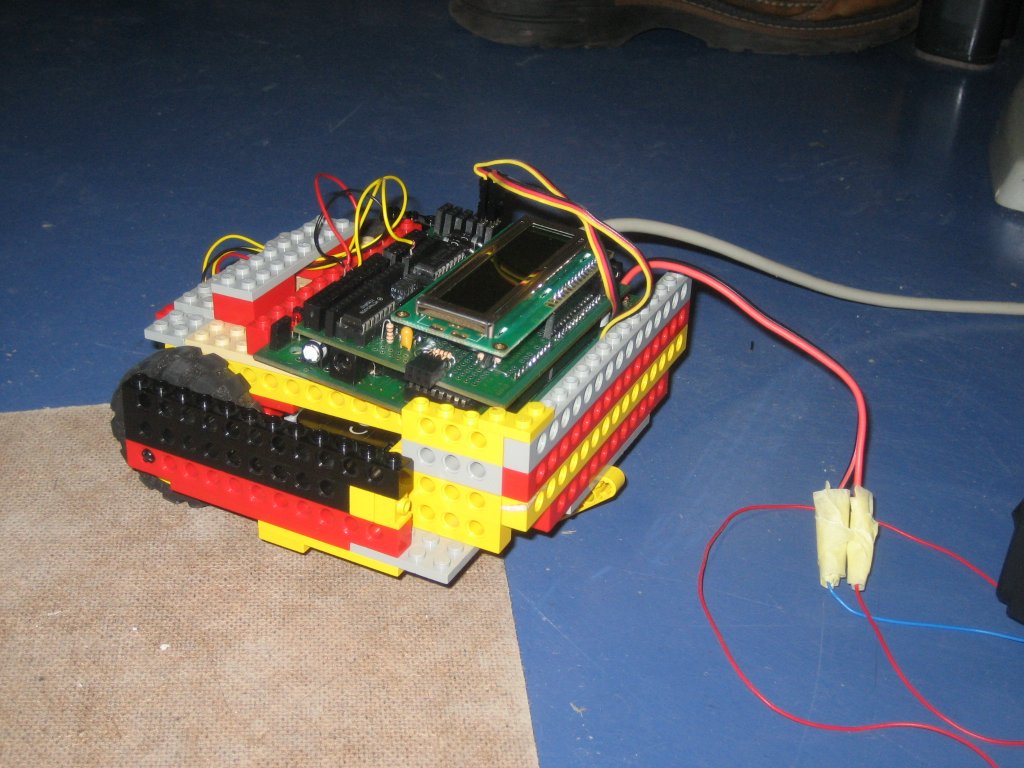
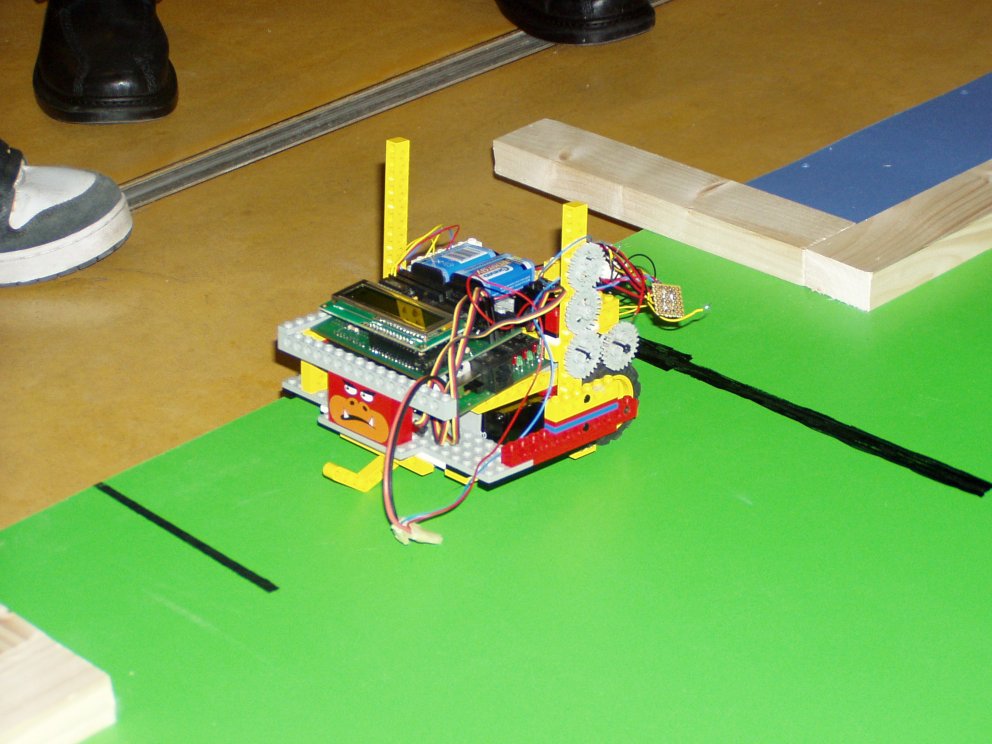
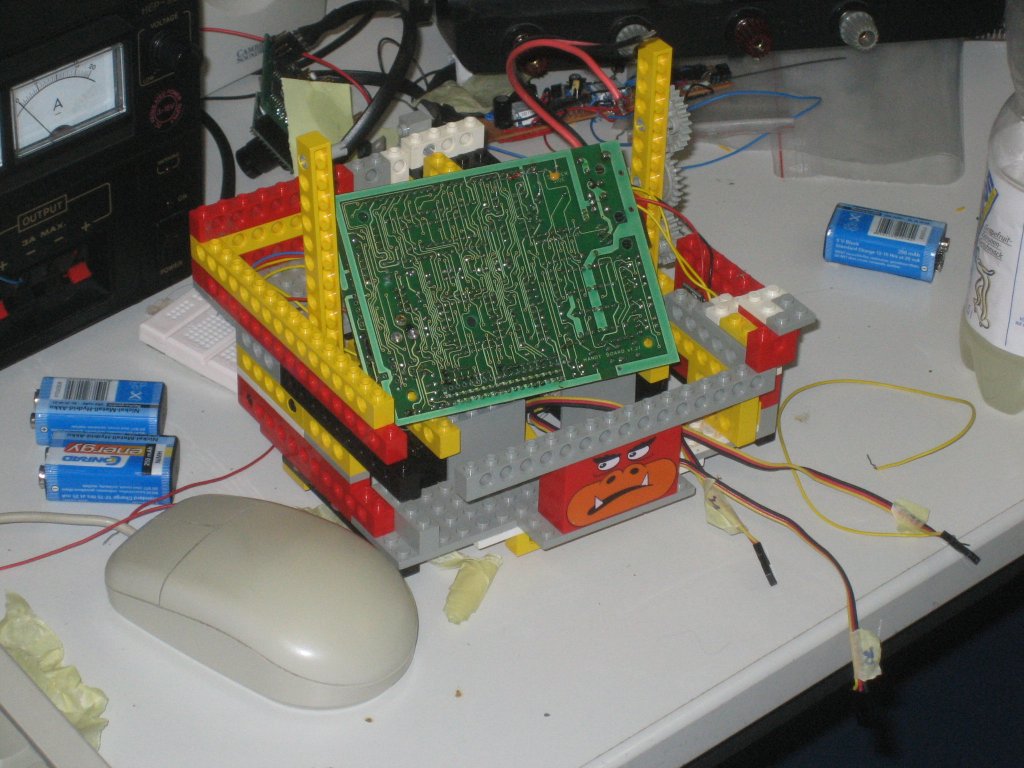
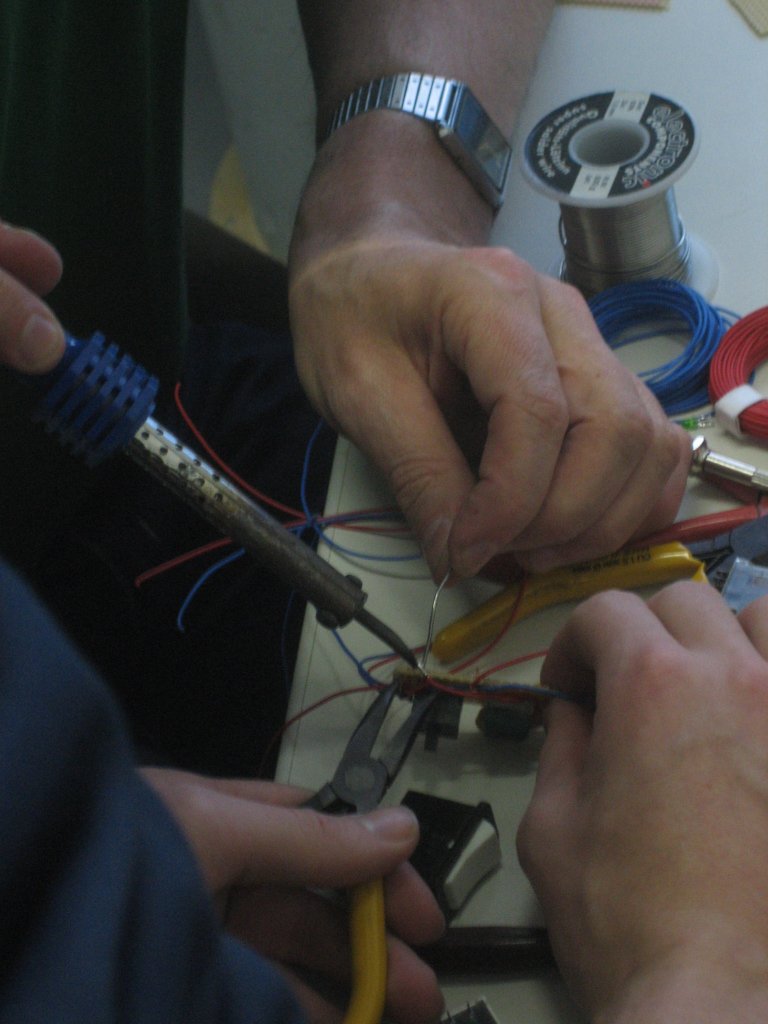
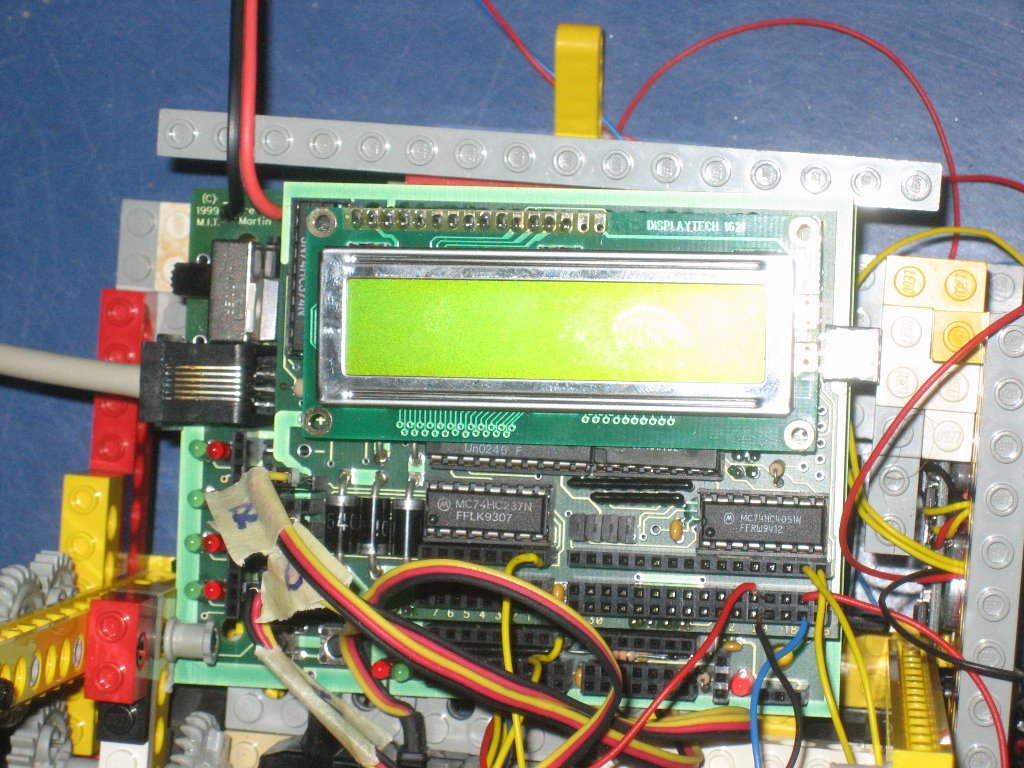
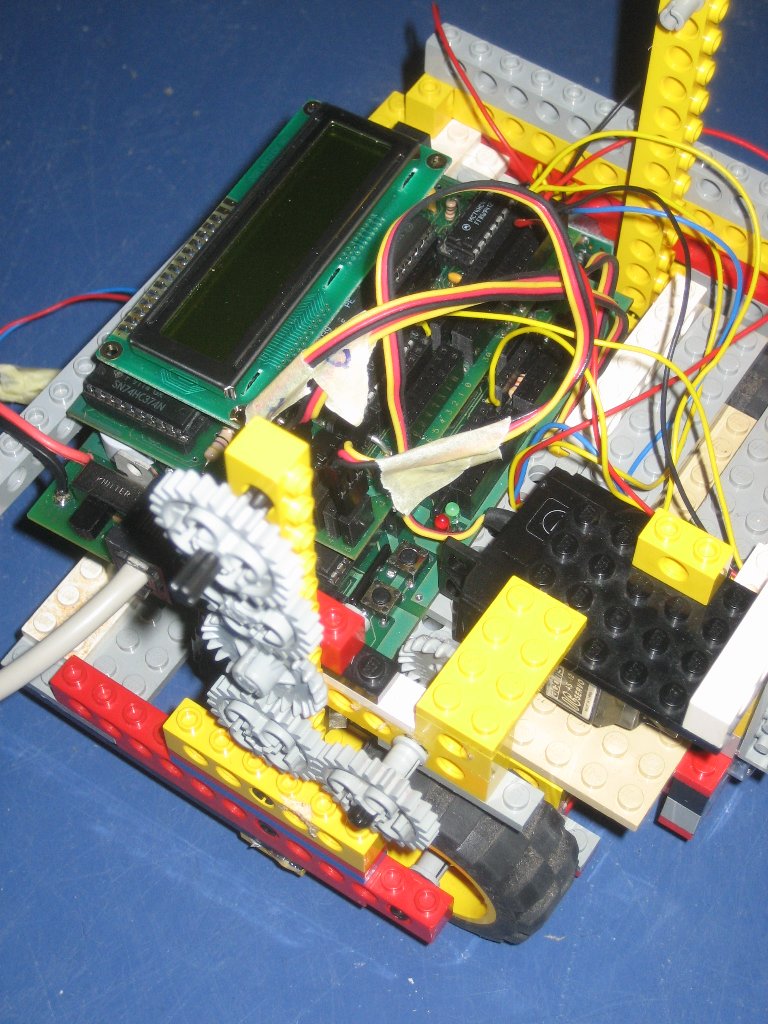
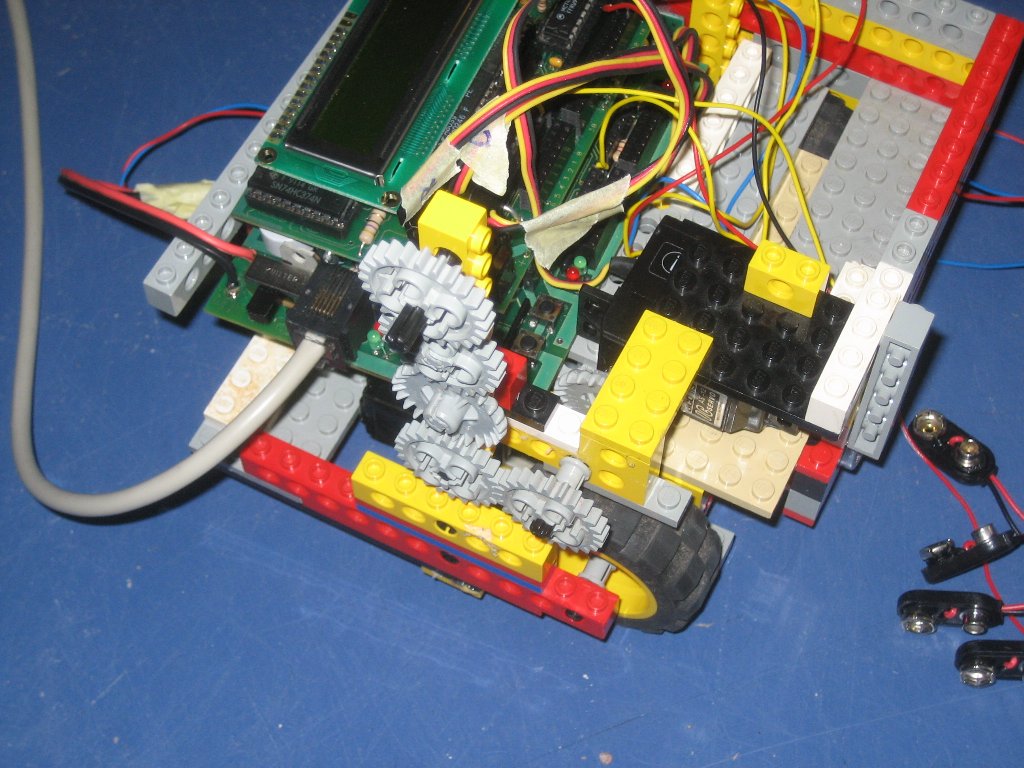
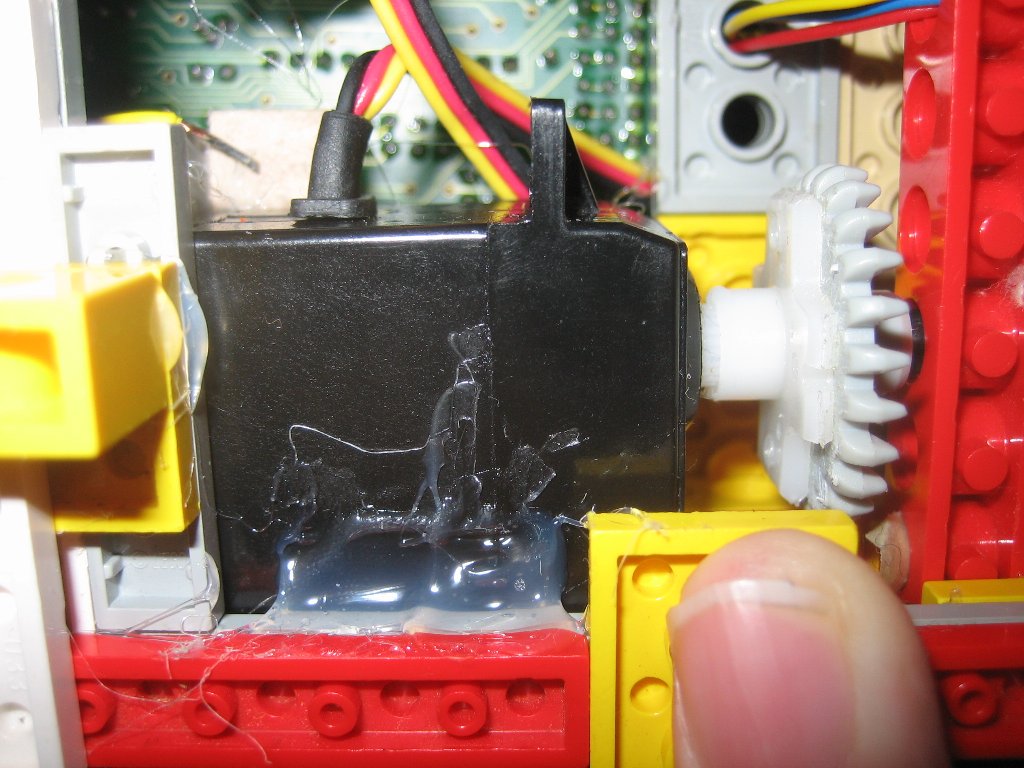
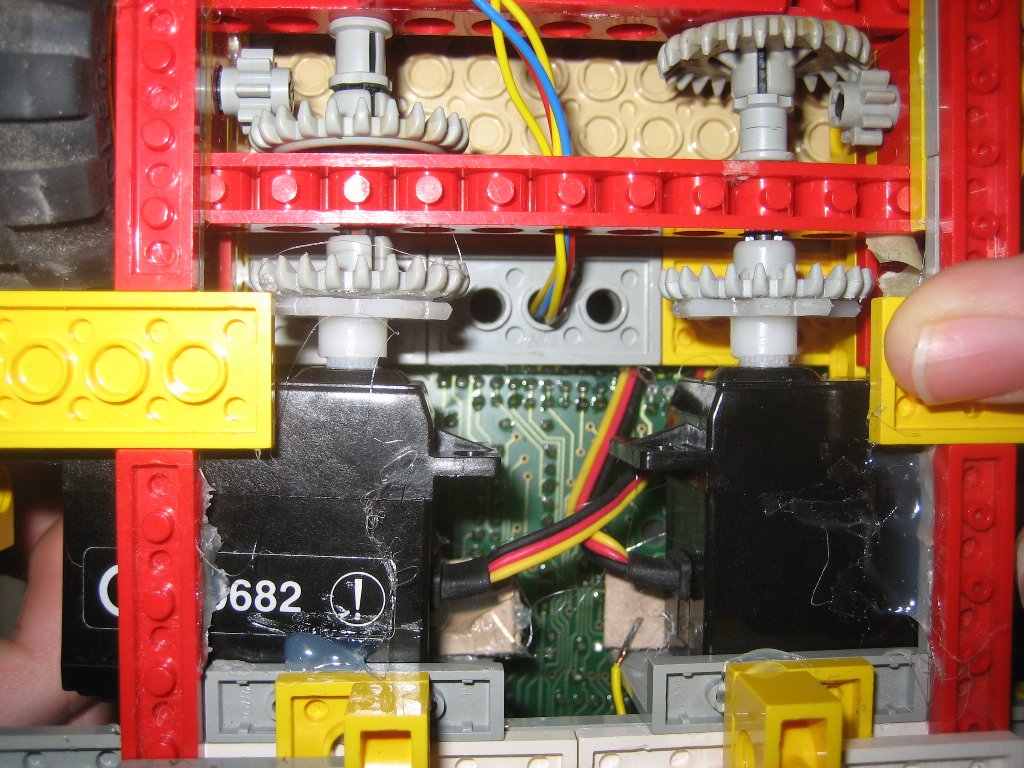
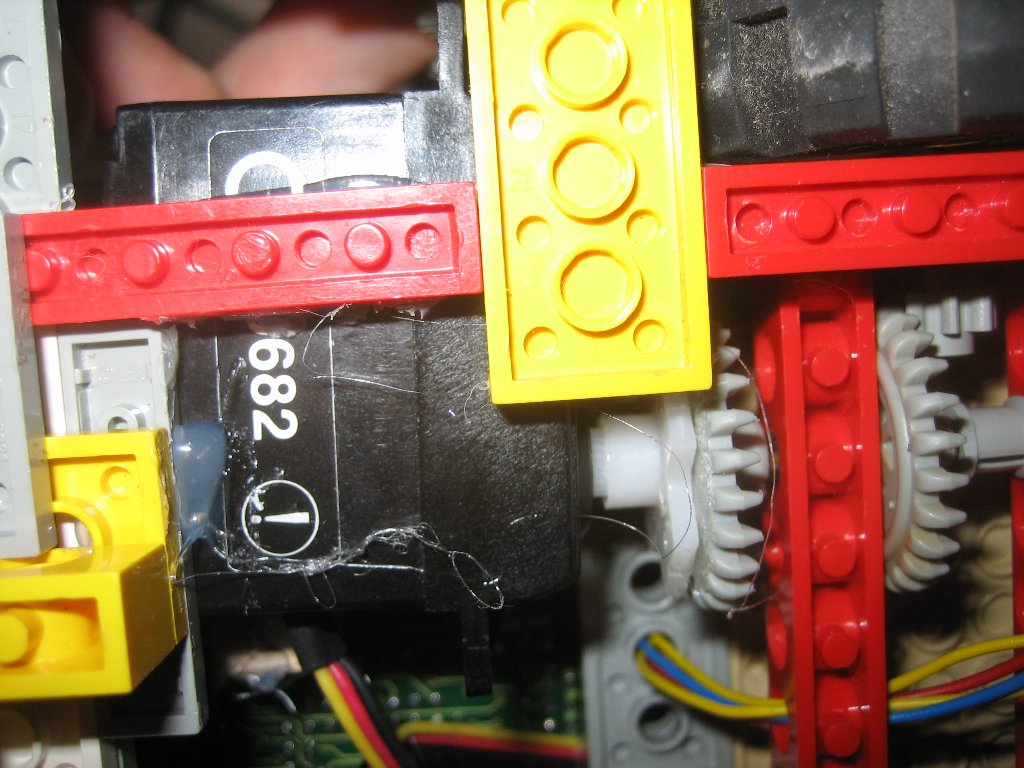
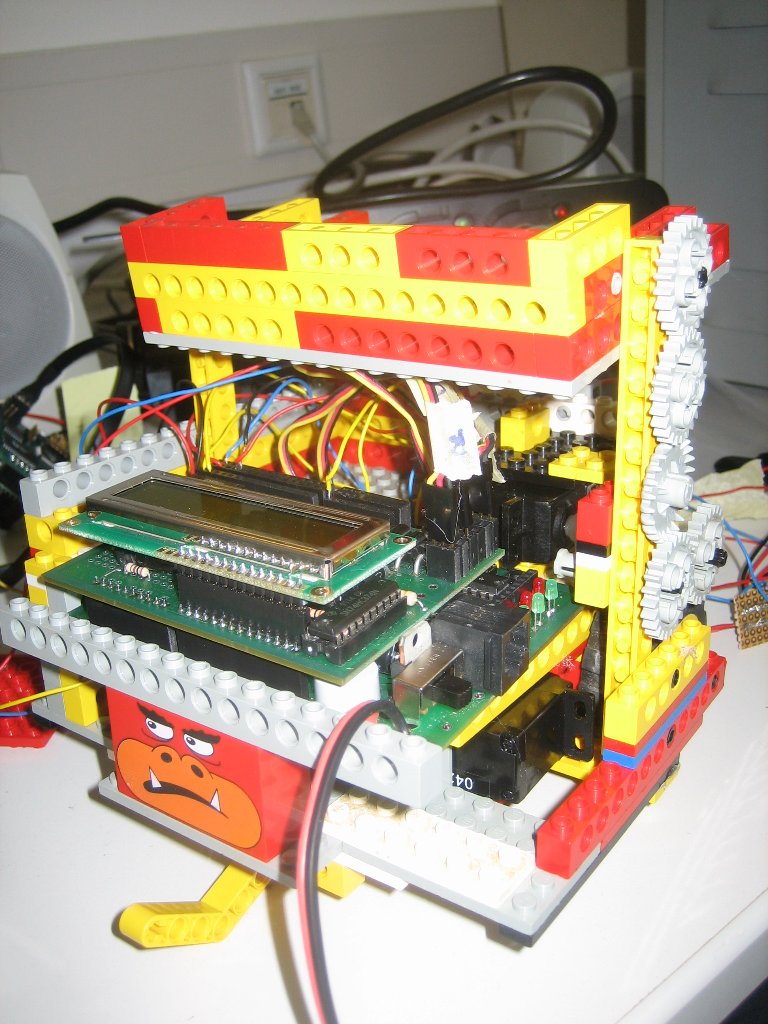
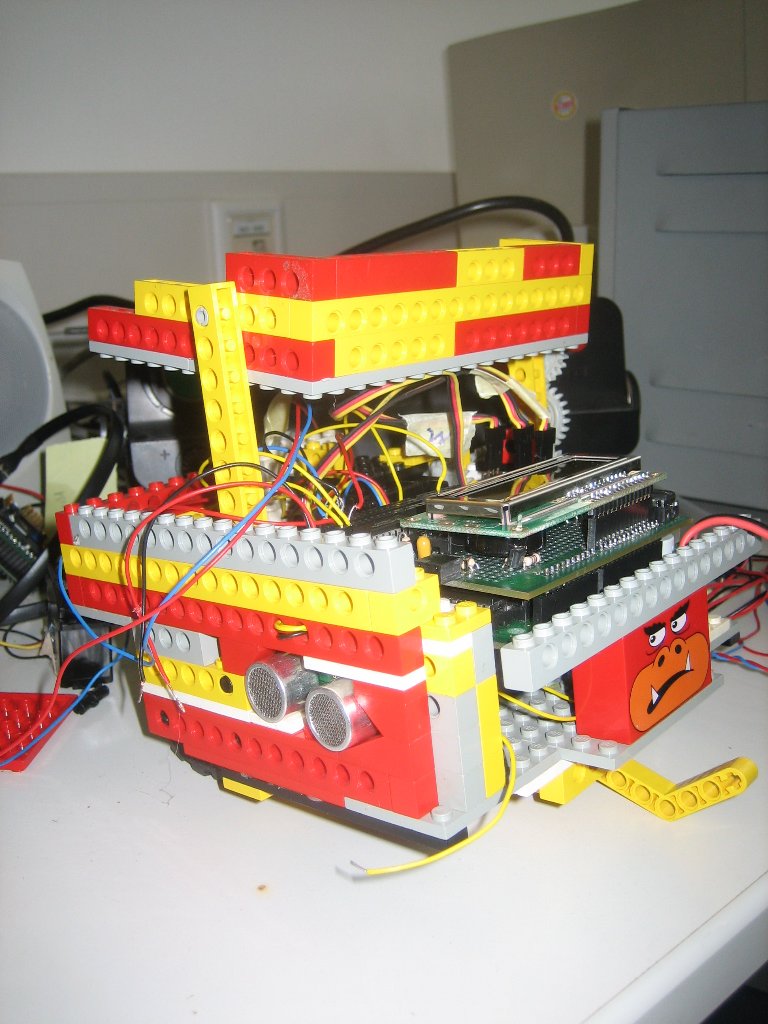
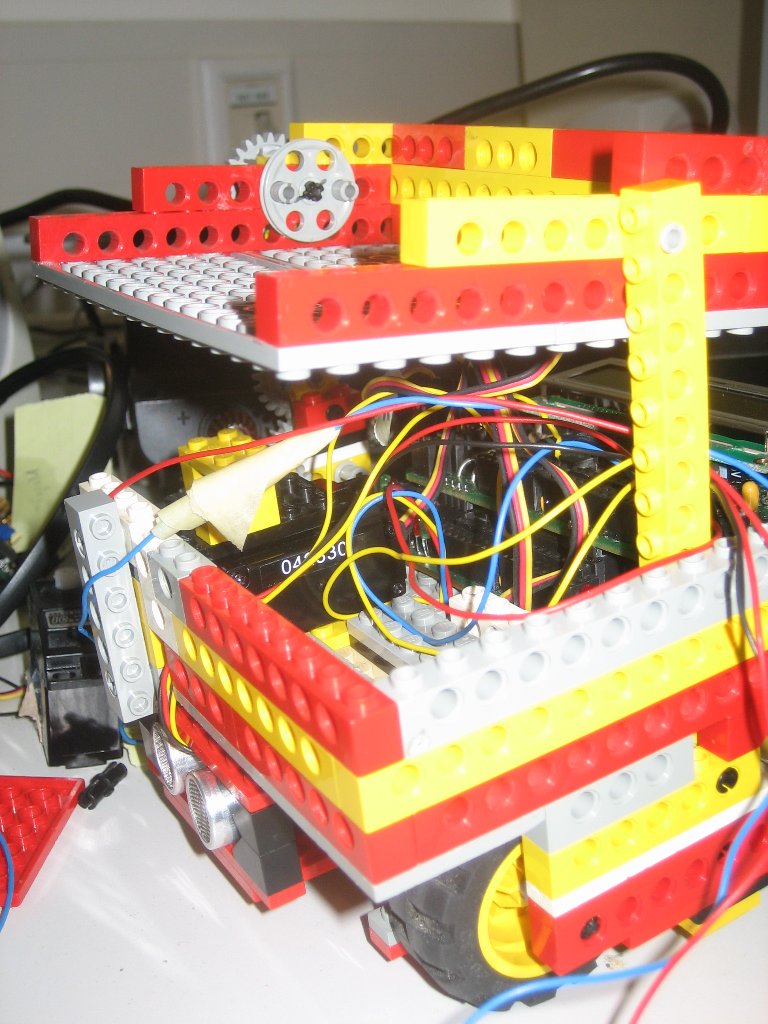
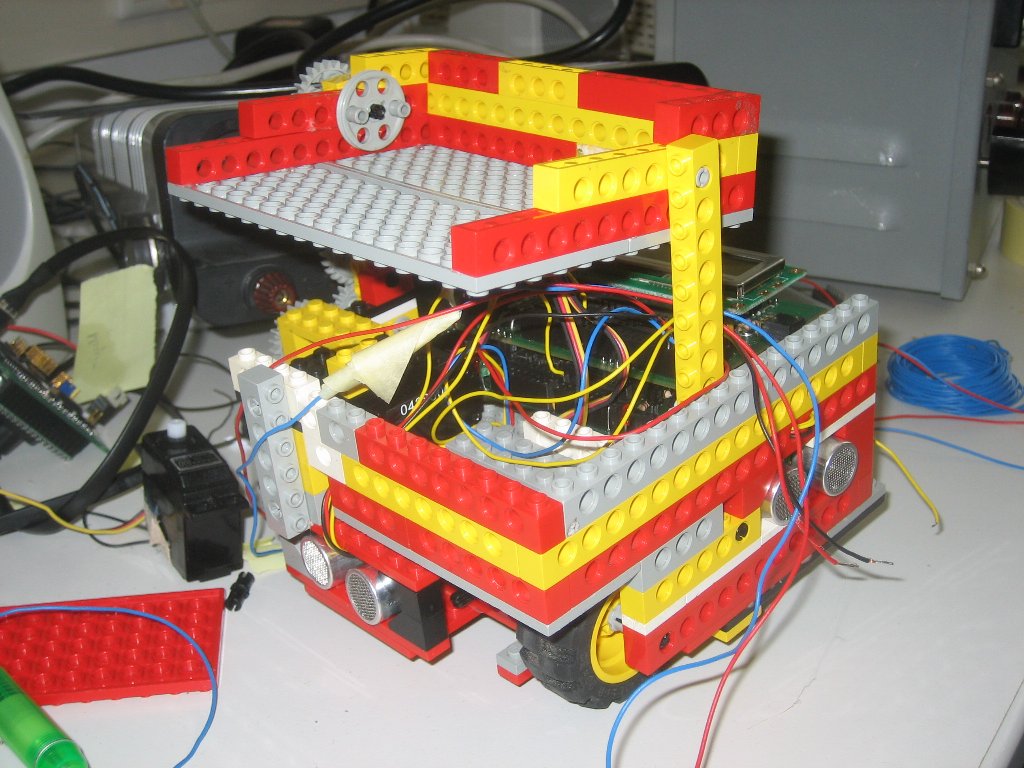
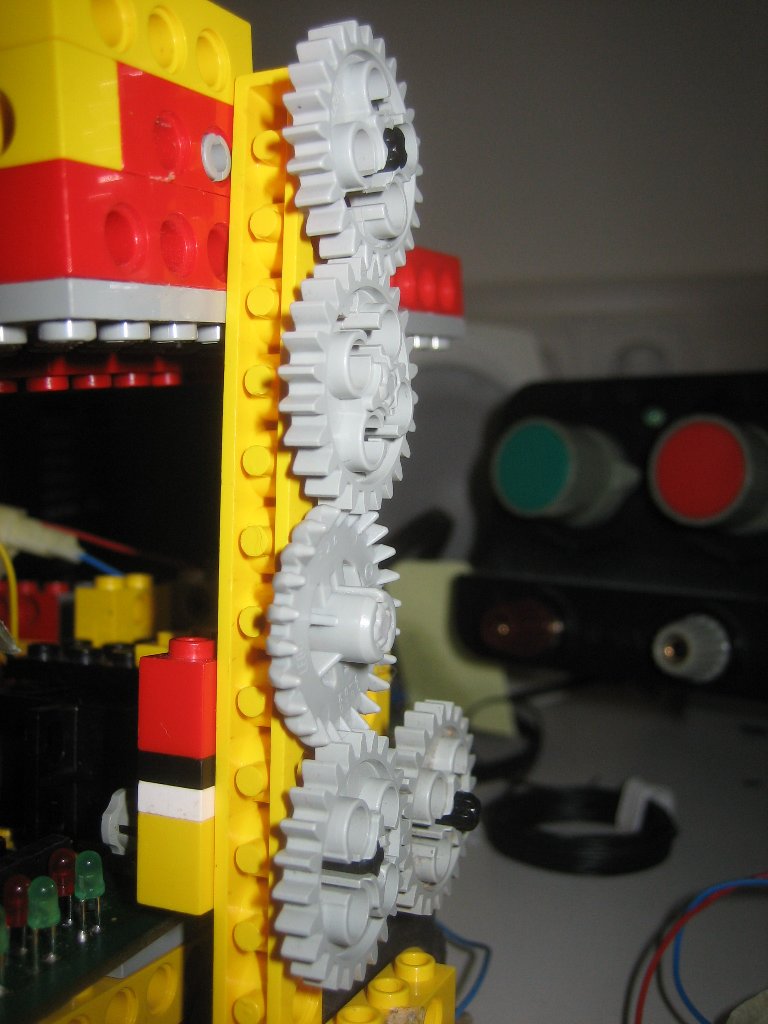
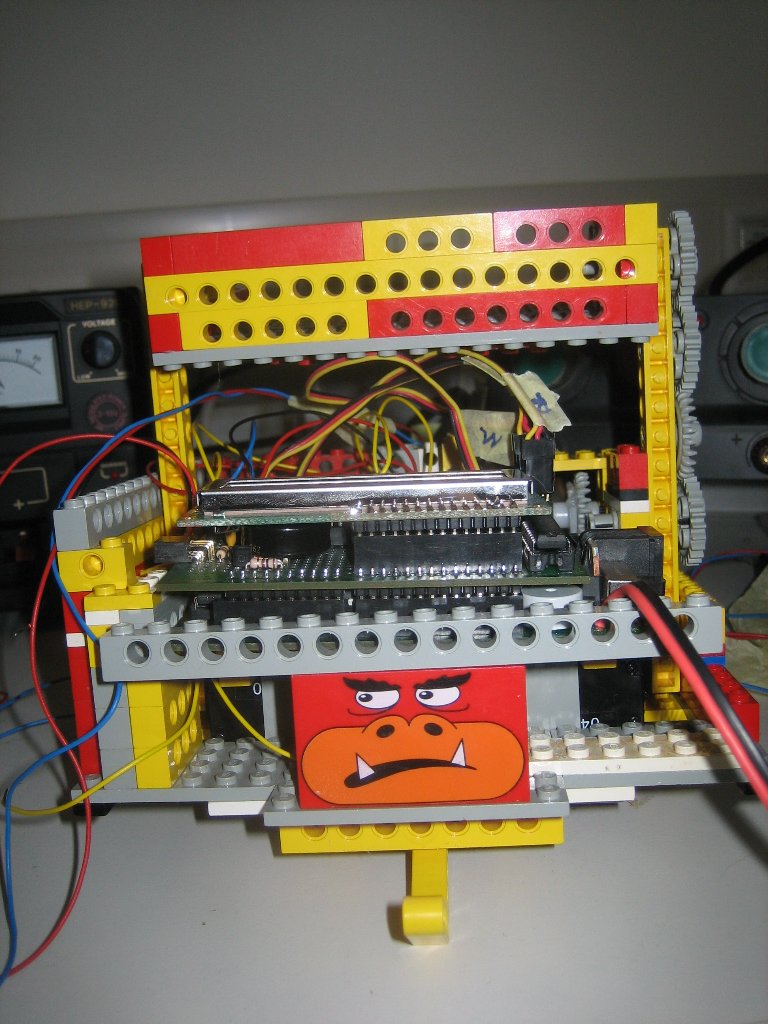
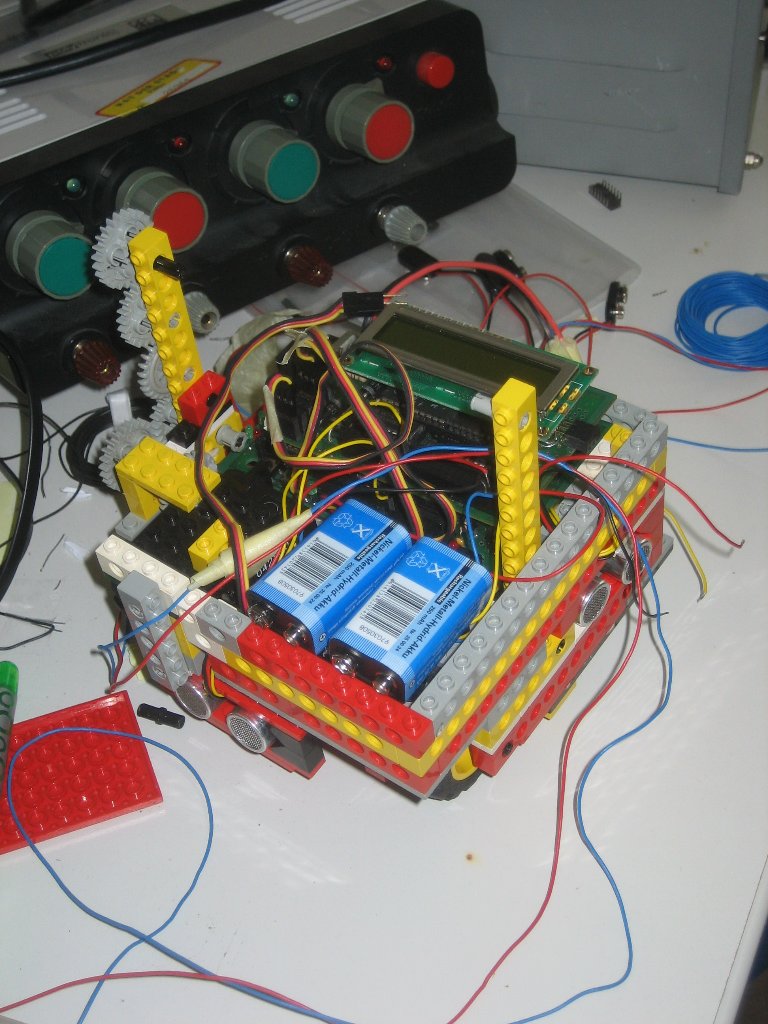
Technische Details
|
|||||||||||||||||||||||||
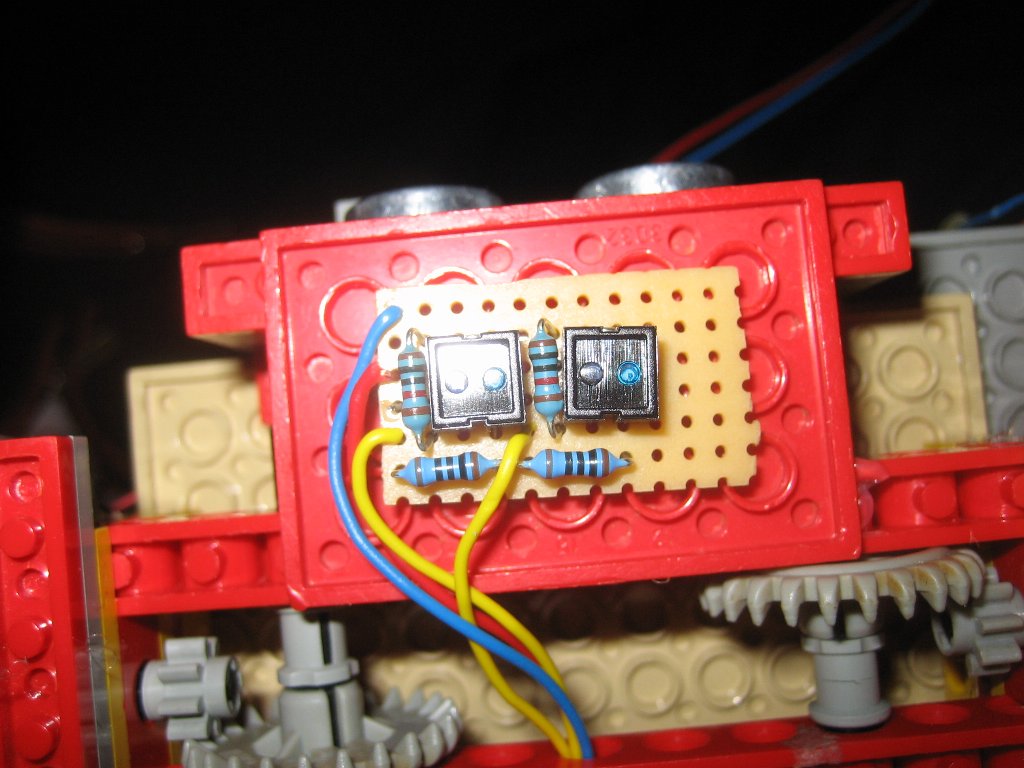
die Spurenerkennung des GOLEM II (Reflexkoppler)
|
|||||||||||||||||||||||||
| Infrarot-Sensoren | |||||||||||||||||||||||||
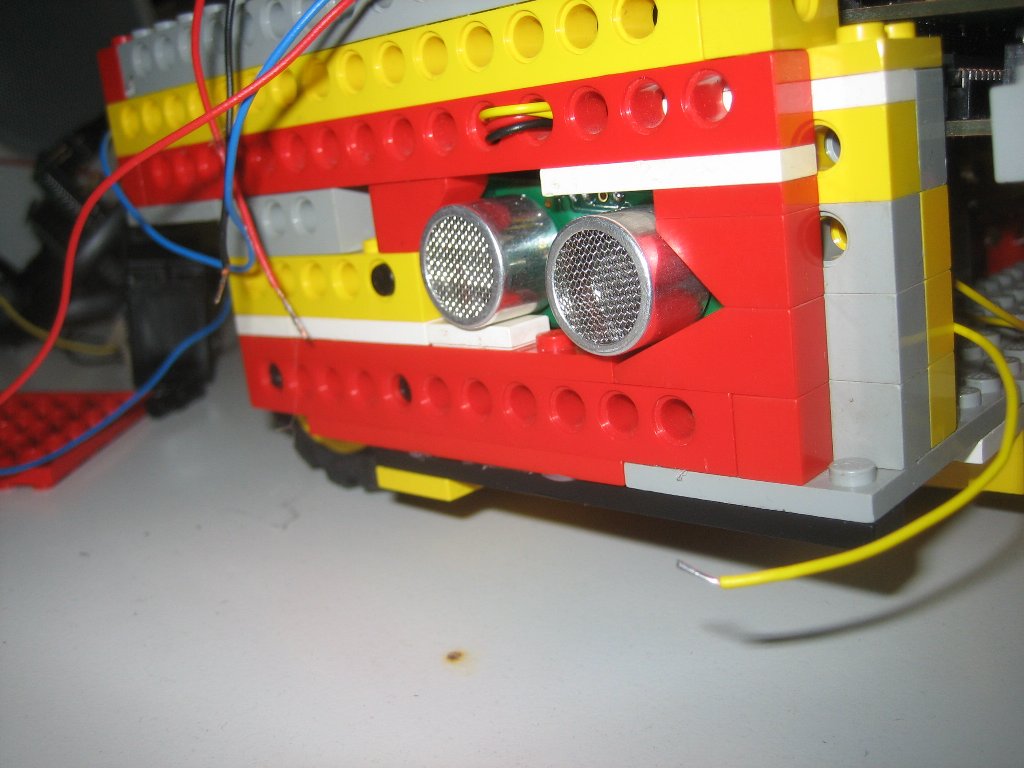
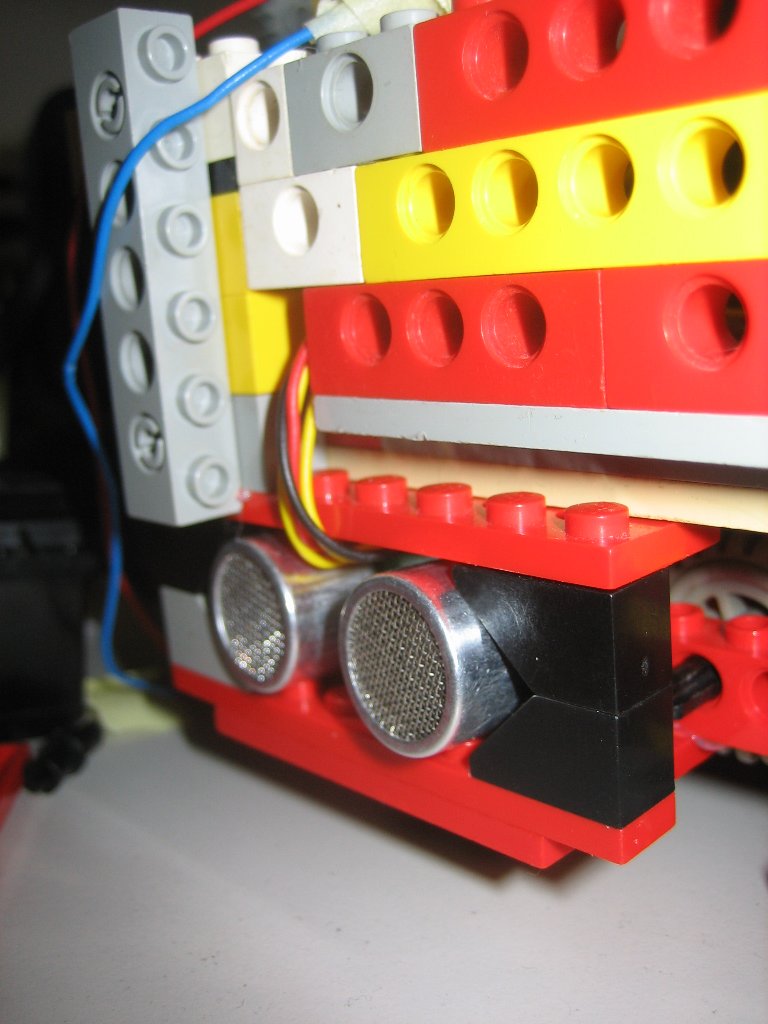
| Ultraschallsensoren | |||||||||||||||||||||||||
| 6. Offizielle Website des Projektes |
|
|
|
|
|
Sie hat ein wenig lange gebraucht - wahrscheinlich wird sie nun um so besser. Die Website liegt in den bewährten Händen von Philipp Oehme und Philipp Korous und wird wohl im wesentlichen eine inhaltliche Kopie des hier vorhandenen Materials werden. |
| ... tackern wir hier an - sie wird geführt von Philipp & Philipp :-) |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) „Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei „f“!“ Diddi Hallervorden, dt. Komiker und Kabarettist |
| 18. Verwandte Themen |
|
|
|
|
|
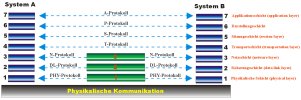
Da unsere Roboter ganz furchtbar viel mit Elektronik, Stromversorgung, Logik, Sensorik, Aktorik und Signalwandlung, aber auch mit Microcontrollern sowie deren Programmierung zu tun haben, können wir hier nun rein theoretisch auf fast jeden Bereich der Informatik verlinken und werden garantiert fündig. Selbst einen Datenübertragung via Schnittstellen ist erforderlich. |
||||||
Bereich Stromversorgung |
|||||||
Bereich Mikroprozessor-Technik |
|||||||
Bereich Logik |
|||||||
Bereich Microcomputer und Microcontroller |
|||||||
Bereich Programmierung |
|||||||
Bereich Robotertechnik |
|||||||
Bereich Datenkommunikation |
|
zur Hauptseite |
© Samuel-von-Pufendorf-Gymnasium Flöha | © Frank Rost im Januar 2006 |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehemn ;-) „Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei „f“!“ Diddi Hallervorden, dt. Komiker und Kabarettist |