| PIC Programmer-Board K8076 von Velleman |
|
|
Letztmalig dran rumgefummelt: 12.04.10 12:54:46 |
|
|
Nachdem alle VorbereitungsmaÔnahmen getroffen wurden (das Programm in einer Hochsprache, wie z. B. in JAL formuliert, anschlieÔend compiliert und in HEX-Code umgewandelt wurde), muss der Programm-Code nun auch in den Controller geschrieben werden (der Controller wird programmiert). Diese Aufgabe ■bernehmen Programmer und das Ganze funktioniert so ðhnlich, wie bei einem USB-Stick. | ||||||
1. Technische Parameter sowie wichtige
Hinweise |
|||||||
|
|||||||
|
|
Quellen:
|
| 1. Technische Parameter sowie wichtige Hinweise |
|
|
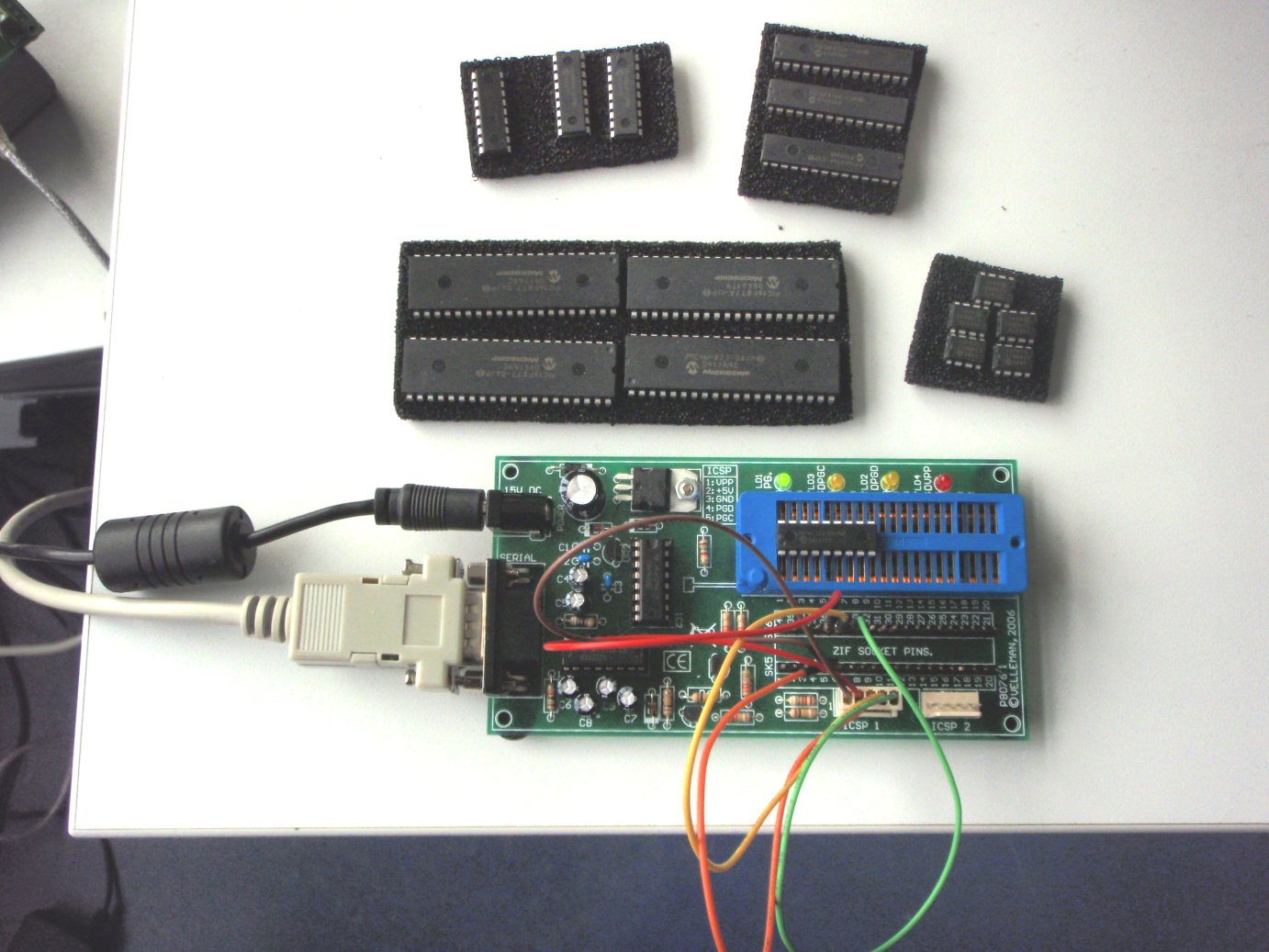
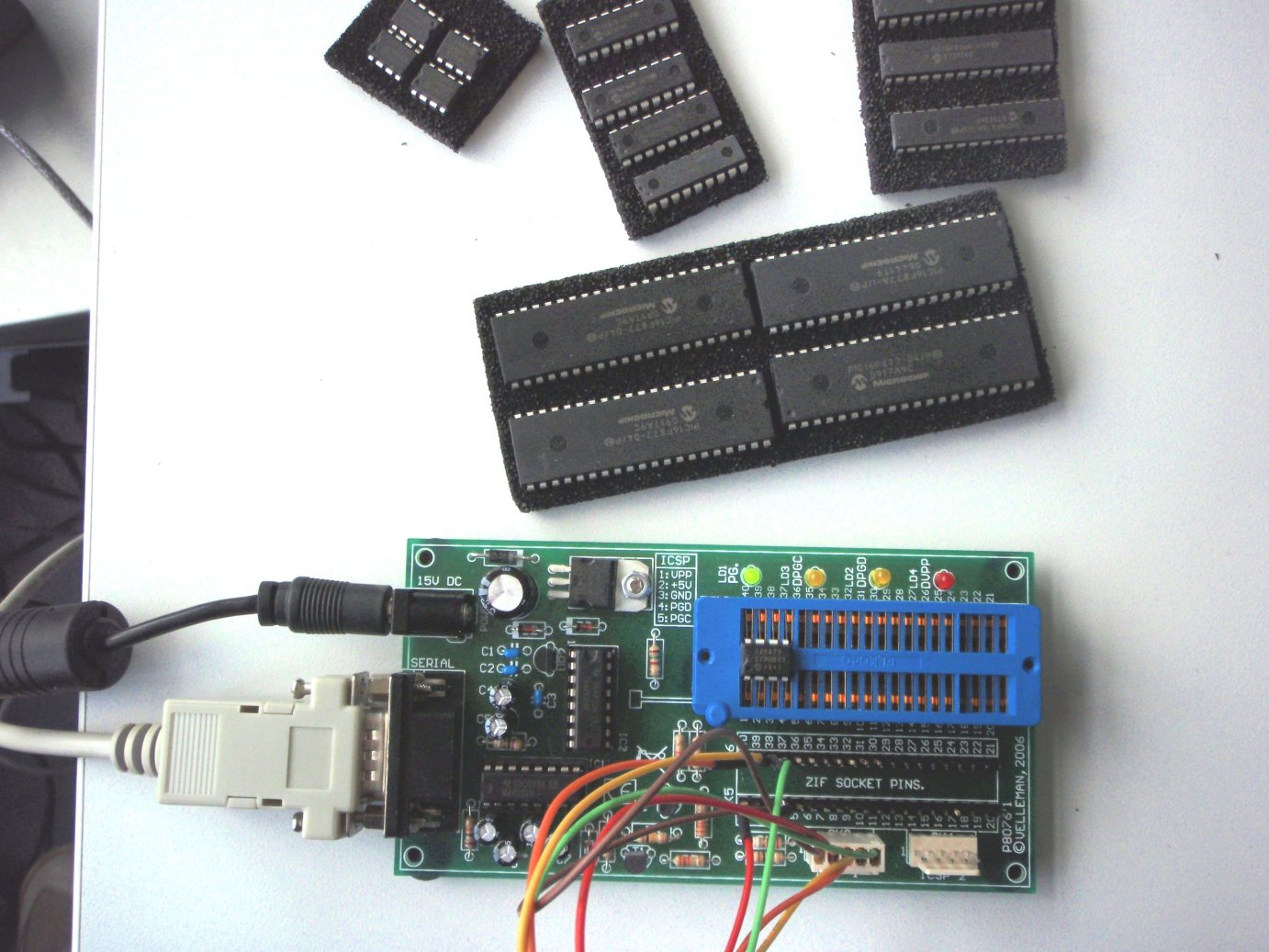
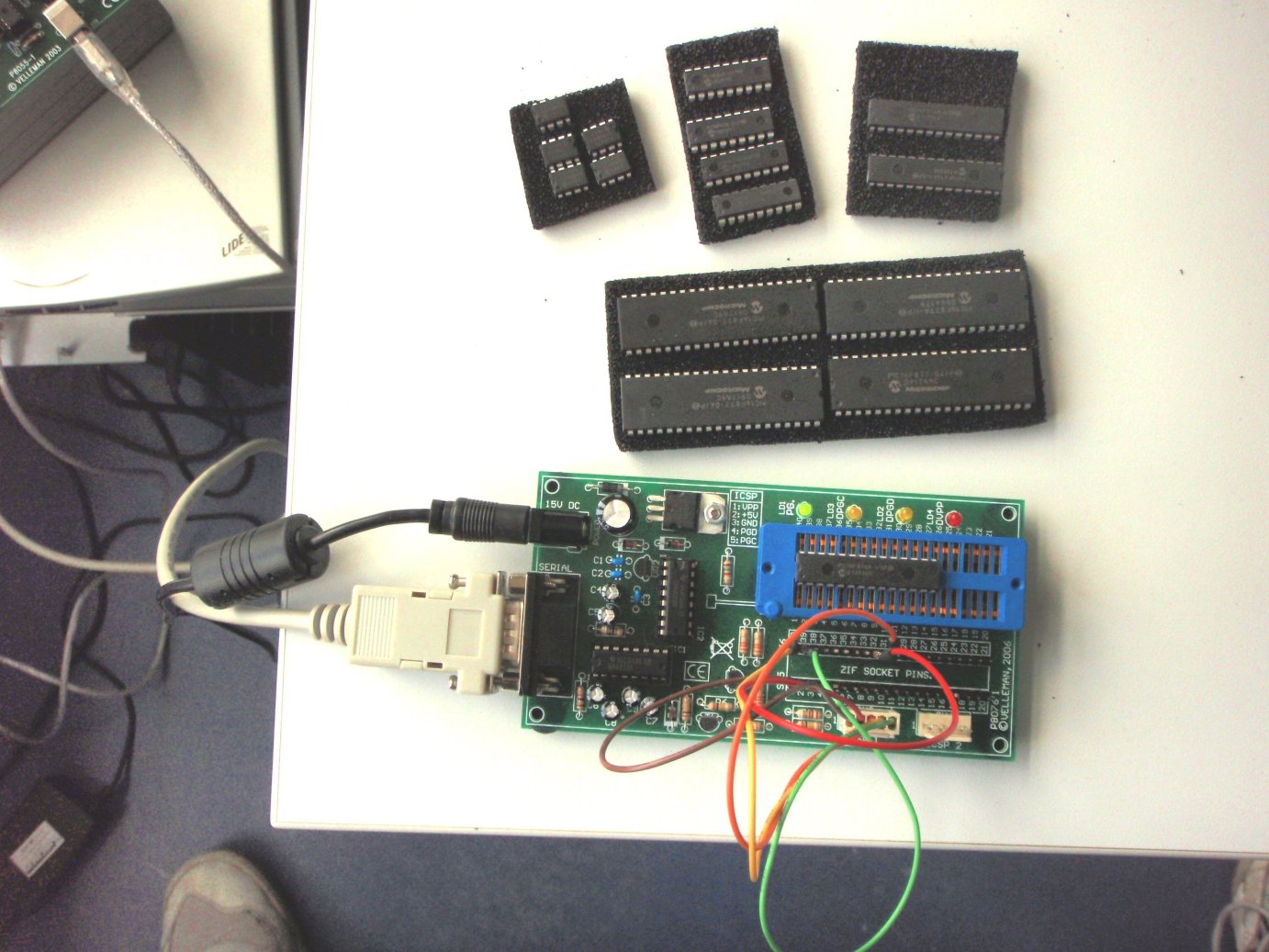
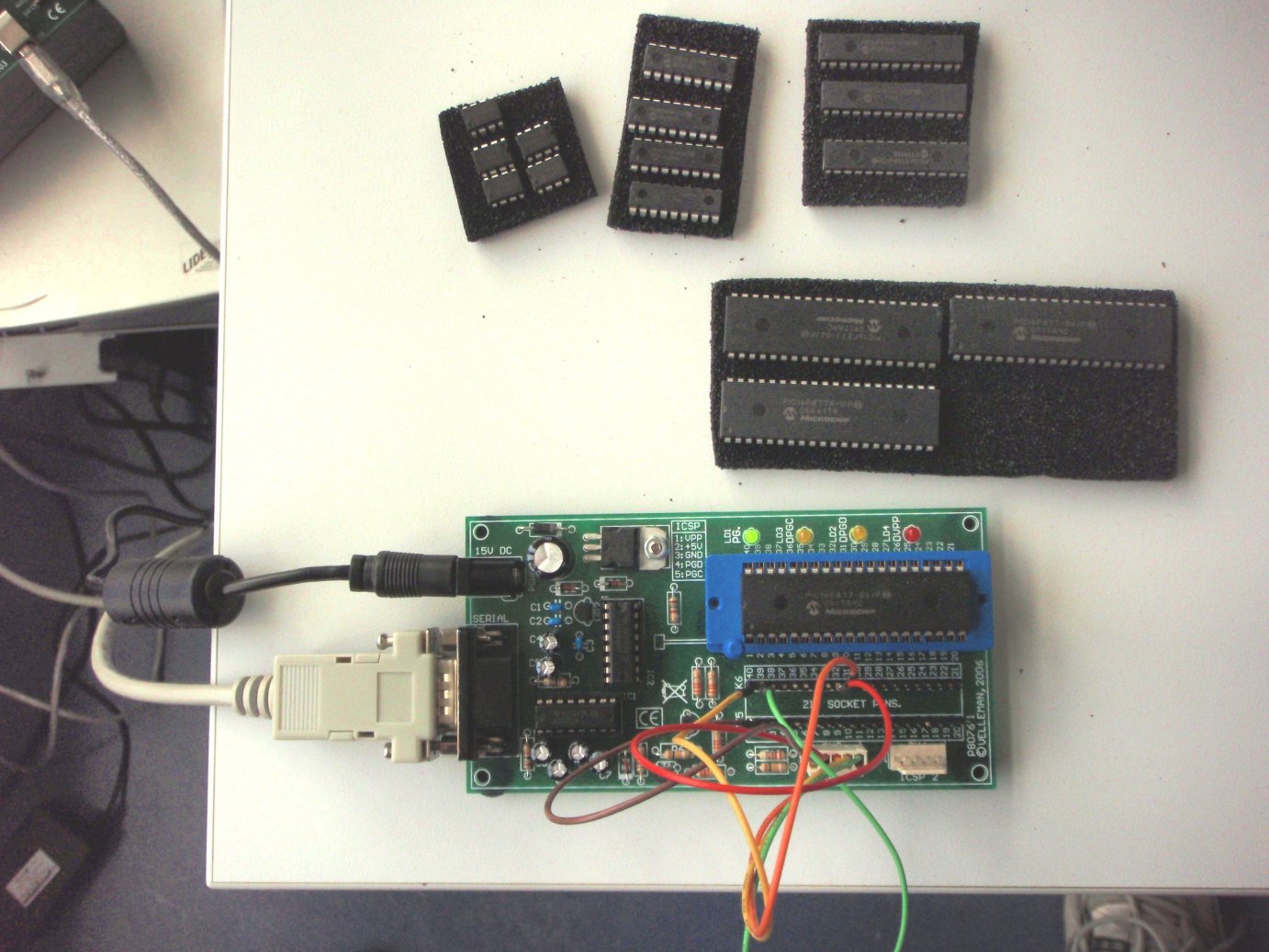
Nachfolgend das Wichtigste zum PIC-Programmer K8076 der belgischen Firma Velleman. Achte besonders auf richtige Polung, korrekte Anpassung der Jumper-Steckleiste sowie die der Gr—Ôe entsprechende Lage des Schaltkreises in der Fassung. Bei der Programmierung gib es zumindest in der Anschlussbelegung auf der Steckerleiste zwischen den Grund- sowie den A-Typen keinen Unterschied - in den Leistungsparamtern dagegen sehr wohl!!! | ||||||||||||||||||||||||
|
|||||||||||||||||||||||||
Technische Parameter:
|
|||||||||||||||||||||||||
| 2. PIC-Programmierung |
|
|
F■r die Programmierung der PIC-Controller gibt es ganz offensichtlich verschiedene M—glichkeiten und Werkzeuge - sowohl hard- als auch softwareseitig. Und nicht zu vergessen ist die Tatsache, dass die fertigen geschriebenen und compilierten Programme HEX-konvertiert sowie in den Controller ■bertragen werden m■ssen. Als Programmiersprachen kommen Assembler f■r die jeweiligen Zielprozessoren oder aber auch Hochsprachen wie C- und BASIC-Derivate zum Einsatz | ||||||
|
| 3. Speicheraufteilung |
|
|
Mit Sicherheit ist der PIC16F877 f■r die weitaus meisten Projekte v—llig ■berdimensioniert und somit zu teuer und zu aufwendig (alte deutsche Rechtschreibung!). F■r die Mehrzahl der kleinen "Elektronik-Anwendungen" und Aufgabenstellungen ist |
| 4. Controller-Peripherie |
|
|
|
|
|
| 5. Projekte & Linksammlung |
|
|
Mit Sicherheit ist der PIC16F877 f■r die weitaus meisten Projekte v—llig ■berdimensioniert und somit zu teuer und zu aufwendig (alte deutsche Rechtschreibung!). F■r die Mehrzahl der kleinen "Elektronik-Anwendungen" und Aufgabenstellungen ist |
|
|
| 6. Verwandte Themen |
|
|
|
|
|
Was ist alles mit dem Betriebssystem eines Microcomputers verwandt? Antwort: faktisch der gesamte Bereich der Digitalelektronik und sowieso die gesamte Technik der Software-Technologie der Vergangenheit, Gegenwart sowie zumindest der nðchsten Zukunft. | ||||||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
|
zur Hauptseite |
ˋ Samuel-von-Pufendorf-Gymnasium Fl—ha | ˋ Frank Rost am 1. Mðrz 2010 um 8.26 Uhr |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehmen ;-) Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei f! Diddi Hallervorden, dt. Komiker und Kabarettist |
|
Diese Seite wurde ohne Zusatz irgendwelcher Konversationsstoffe erstellt ;-) |