| C-Control I Main Unit |
|
|
Letztmalig dran rumgefummelt: 23.01.09 23:41:25 |
|
|
Hier wird's nun etwas intensiver mit C-Control I Main Unit. Wer immer mit Controllern sowie deren Programmierung und Erweiterung etwas vor hat, ist mit diesem Basis-Satz bestens bedient. Nähere Erläuterungen zu möglichen Erweiterungen gibt's hier. | ||||||
|
0. Die Idee des C-Control I/Plus-Systems |
|||||||
|
|||||||
|
|
|||||||
| 0. Die Idee des C-Control I/Plus |
|
|
|
|
|
Der C-Control/plus Steuercomputer ist ein kompakter Baustein für den universellen Einsatz in Mess-, Steuer- und Regelungsaufgaben und verfügt außerdem über die Fähigkeiten der seriellen Datenübertragung und der Datenspeicherung. |
|
Handhabungs- und Sicherheitshinweise Der C-Control/plus Steuercomputer wurde gemäß den geltenden gesetzlichen Vorschriften einer Sicherheitsprüfung unterzogen und entsprechend zertifiziert (CE). Bei sachgemäßen Gebrauch gehen normalerweise keine Gesundheitsgefährdungen vom Gerät aus. |
||
Umgebungsbedingungen Das Gerät ist nicht gegen Lichtbogenüberschläge geschützt und darf nicht in Starkstromindustrieanlagen verwendet werden. Die maximalen Eingangsgrößen gemäß den Spezifikationen in den Technischen Daten dürfen nicht überschritten werden. Das Gerät ist nicht in Räumen oder Umgebungen einzusetzen, in denen brennbare oder ätzende Gase, Dämpfe oder Stäube vorhanden sind oder vorhanden sein können. |
||
Versorgungsspannung Alle elektrischen Verbindungen von und zum Gerät sind stets vor Anschluss der Versorgungsspannung herzustellen. Das Aufstecken oder Abziehen von Verbindungskabeln oder das Herstellen oder Lösen von Verbindungen zu Komponenten der Zielapplikation während des Betriebes können zur Zerstörung des Steuercomputers oder angeschlossener Geräte führen.
|
||
Elektrostatische Entladungen
|
| 1. Hardware |
|
|
|
|
|
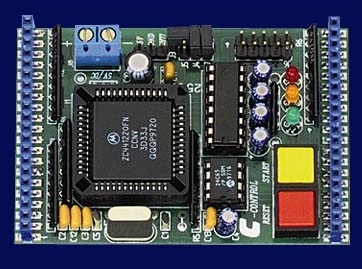
Herzstück des Systems ist ein Mikrocontroller vom Typ MC68HC05B6 von MOTOROLA. Der Steuercomputer ist auf einer Platine von viertel Europlatinenformat aufgebaut. Darauf befinden sich neben dem Mikrocontroller ein Speicherchip, ein Pegelwandlerchip für die serielle Schnittstelle (RS232), zwei Systemsteuertasten sowie drei Systemsignal-Leuchtdioden (LEDs). Der Speicherchip hat eine Kapazität von acht Kilobyte. Er dient zur Aufnahme Ihres Anwenderprogramms und kann auch zur Aufzeichnung von Daten benutzt werden. Durch die EEPROM-Technologie bleiben alle Informationen auch nach Abschalten der Betriebsspannung erhalten. Alle Ein- und Ausgänge sowie einige Systemsignale sind an zwei Buchsenleisten zugänglich. Über diese wird der Steuercomputer mit der Zielapplikation verbunden. |
||||||||||||||||||||||||||||||||||||||||||
|
Blockschaltbild C-Control(Plus
|
|||||||||||||||||||||||||||||||||||||||||||
|
Technische Daten
|
|||||||||||||||||||||||||||||||||||||||||||
|
Belegung der Steckbuchsen Die Kontakte mit der Nummer 1 sind im Bestückungs- und Anschlussplan und auf der Platine beschriftet. Die weiteren Nummern ergeben sich fortlaufend. Alle mit einem * gekennzeichneten Signale sind für spätere Erweiterungen reserviert und sollten nicht benutzt werden. |
|||||||||||||||||||||||||||||||||||||||||||
|
Steckbuchse 1
|
|||||||||||||||||||||||||||||||||||||||||||
|
Steckbuchse 2
|
|||||||||||||||||||||||||||||||||||||||||||
|
Anschluss eines Schaltkontaktes an einen Digitaleingang |
|||||||||||||||||||||||||||||||||||||||||||
|
Anschluss eines Transitors zur Ansteuerung eines Relais |
| 2. Technische Einsatzbedingungen von C-Control/Plus |
|
|
|
|
|
Herzstück des Systems ist ein Mikrocontroller vom Typ MC68HCO5B6 von MOTOROLA. Der Steuercomputer ist auf einer Platine von viertel Europlatinenformat aufgebaut. Darauf befinden sich neben dem Mikrocontroller ein Speicherchip, ein Pegelwandlerchip für die serielle Schnittstelle (RS232), zwei Systemsteuertasten sowie drei Systemsignal-Leuchtdioden (LEDs). Der Speicherchip hat eine Kapazität von acht Kilobyte. Er dient zur Aufnahme Ihres Anwenderprogramms und kann auch zur Aufzeichnung von Daten benutzt werden. Durch die EEPROM-Technologie bleiben alle Informationen auch nach Abschalten der Betriebsspannung erhalten. Alle Ein- und Ausgänge sowie einige Systemsignale sind an zwei Buchsenleisten zugänglich. Über diese wird der Steuercomputer mit der Zielapplikation verbunden. |
|
Software Wie funktioniert C-Control/plus? Das von Ihnen erstellte Programm wird von einem Compiler in eine Folge von Befehlsbytes umgesetzt. Die Befehle und die zugehörigen Parameterbytes werden über die serielle Schnittstelle zum Steuercomputer übertragen, wo sie von dessen Betriebssystem im EEPROM-Speicherchip abgelegt werden. Durch das C-Control Konzept können ihre Anwendungsprogramme in sehr kompakter Form gespeichert werden und belegen meist nur wenige hundert der über 8000 zur Verfügung stehenden Bytes. Damit bleibt ein großer Teil des Speicherchips frei und kann zur Aufzeichnung von Daten benutzt werden. Nach Betätigung des Starttasters beginnt das Betriebsystem die Befehle nacheinander aus dem Speicher zu lesen und abzuarbeiten, bis zum Programmende-Befehl. |
|
|
Kommunikation zwischen PC und dem C-Control/plus Steuercomputer Die serielle Schnittstelle zwischen PC und dem Steuercomputer arbeitet bidirektional. Über sie werden neben den Befehlscodes zur Programmierung eines Anwenderprogramms auch einige Konfigurations- und Steuerbefehle sowie Statusinformationen übertragen. |
|
|
Erste Inbetriebnahme - Schritt für Schritt |
|
|
Software-Installation Die Anweisungen zur Installation der Software entnehmen Sie bitte der Datei INSTALL.TXT. |
|
|
Bereitstellen einer Spannungsversorgung Stellen Sie eine 5-Volt-Gleichspannungsversorgung (bzw. 8...12 Volt beim Betrieb des Systems mit Starter Board oder Application Board) mit zwei abisolierten Kabelenden zur Verfügung. Prüfen Sie bitte, welches der beiden Kabelenden Masse („Minus") und welches spannungsführend („Plus") ist. Schalten Sie die Spannungsversorgung aus und klemmen Sie die Kabelenden an der zweipoligen Schraubklemme (J8) des Steuercomputers (bzw. J5 des Starter Boards) polungsrichtig an. Beachten Sie dabei bitte den Anschlußplan im Abschnitt Aufbau und Funktionsweise und die Polungshinweise (+, -) auf der Platine. |
|
|
Verbinden des Steuercomputers mit dem PC Mit dem Gerät wurden Ihnen zwei Schnittstellenkabel ausgeliefert: ein 9-poliges Nullmodemkabel (ca. 1,5 Meter) und ein Adapterkabel (ca. 30 cm). Stecken Sie Sie nun das Nullmodemkabel an eine freie serielle Schnittstelle Ihres Computers. Viele Computer verfügen über eine 9-poligen und eine 25-polige serielle Schnittstelle. Sollte bei Ihrem Computer nur noch eine 25-polige Schnittstelle frei sein, benötigen Sie einen zusätzlichen Adapter. |
| 3. Input und Output |
|
|
|
|
|
Die serielle Schnittstelle zwischen PC und dem Steuercomputer arbeitet bidirektional. Über sie werden neben den Befehlscodes zur Programmierung eines Anwenderprogramms auch einige Konfigurations- und Steuerbefehle sowie Statusinformationen übertragen. |
|
Bedien- und Anzeigeelemente Taster Der Steuercomputer verfügt über zwei Taster: einen roten Reset-Taster und einen gelben Start-Taster.
|
|
|
Leuchtdioden (LEDs) Drei Leuchtdioden geben einen Überblick über den Status des Systems:
|
|
|
Steckbrücken zur Systemkonfiguration Mit drei Steckbrücken (Jumper) ist eine Konfiguration des Systems möglich. Die Stiftleisten zur Aufnahme der Steckbrücken sind mit einem Bestückungsdruck versehen.
|
| 4. Kommunikation zwischen PC und dem C-Control/plus Steuercomputer |
|
|
|
|
|
Die serielle Schnittstelle zwischen PC und dem Steuercomputer arbeitet bidirektional. Über sie werden neben den Befehlscodes zur Programmierung eines Anwenderprogramms auch einige Konfigurations- und Steuerbefehle sowie Statusinformationen übertragen. |
|
Anschluss externer Baugruppen An den zwei zwanzigpoligen Buchsenleisten sind alle verwendbaren Ports sowie einige Systemsignale des Steuercomputers herausgeführt. Durch die spezielle Bauform der Buchsenleisten kann der
C-Control/plus Steuercomputer auf andere elektronische Baugruppen aufgesteckt werden, wobei Taster, Leuchtdioden und Stiftleisten zugänglich bleiben.
|
|
|
Beschaltung der Digitalports Auf der Leiterplatte des Steuercomputers sind alle Digitalports mit einem Pullup-Widerstand von 10 kOhm versehen. |
|
|
Verwendung eines Digitalports als Eingang Digitaleingänge werden zur Abfrage von Schaltzuständen verwendet. Wird ein Digitalport als Eingang benutzt, führt er im unbeschalteten Zustand High-Pegel. Ist beispielsweise ein Reedkontakt an diesem Port angeschlossen, wird bei offenem Schalter eine logische Eins („wahr") vom Port gelesen, bei geschlossenem Schalter eine logische Null („falsch"). |
|
|
Verwendung eines Digitalports als Ausgang Wird ein Digitalport als Ausgang verwendet, können daran nachfolgende ICs, Transistoren oder Low-Current-Leuchtdioden direkt betrieben werden.
Der maximal zulässige Laststrom beträgt 10 mA. In jedem Fall ist eine ausreichende Strombegrenzung, zum Beispiel durch einen Widerstand, zu gewährleisten, da es sonst zur Zerstörung des Mikrocontrollers
kommen kann! |
|
|
Beschaltung der Analogports Der C-Control/plus Steuercomputer verfügt über acht A/D-Ports und zwei D/A-Wandler. |
|
|
Anlegen der Referenzspannung Bevor die A/D-Eingänge benutzt werden können, muss eine Referenzspannung mit dem Referenzspannungseingang des Gerätes verbunden werden. Der angelegte Spannungwert gilt als Obergrenze des Messbereiches der A/D-Wandlung und entspricht dem Wandlungswert 255 ($FF hexadezimal). Der verwendete Wert hängt vom Ausgangsspannungsbereich der eingesetzten Sensoren an den A/D-Eingängen ab. Meistens kann kann die Betriebsspannung direkt als Referenz benutzt werden. Der Referenzspannungswert darf jedoch die Betriebsspannung von 5 Volt nie übersteigen! Als Referenz für das untere Ende des Messbereiches der A/D-Wandlung dient stets das Groundpotential (Masse, „Minus") der Betriebsspannung. |
|
|
Verwendung der A/D-Eingänge Die A/D-Ports sind auf der Platine des Steuercomputers zum Schutz des A/D-Wandlers im Mikrocontroller mit einem Vorwiderstand von 10 kOhm versehen. An den A/D-Ports können Sensoren aller Art angeschlossen werden, die eine Ausgangsspannung von 0 bis 5 Volt liefern. In den meisten Fällen werden hier aktive Sensoren zur Anwendung kommen, um das Signal des eigentlichen Sensorelementes zu verstärken und den Ansprüchen an Auflösung, Linearität und Driftverhalten zu genügen. |
|
|
Verwendung der D/A-Ausgänge Die zwei 8-Bit-D/A-Wandler arbeiten nach dem Prinzip der Pulsweitenmodulation. In einem Zeitabschnitt (Modulationsintervall), der aus 256 Teilabschnitten besteht, wird ein D/A-Ausgang für die Dauer von so vielen Teilabschnitten high-gepulst, wie es dem 8-Bit-Wert entspricht, der zur Ausgabe bestimmt ist. Die Dauer eines Teilabschnittes beträgt 2ps, die des gesamten Modulationsintervalls 512ps (1953 Hz). Zur Demodulation, also Wandlung in ein echtes Analogsignal genügt meist ein einfaches RC-Glied. Beachten Sie dabei jedoch die Restwelligkeit und den erzielbaren Maximalwert des Ausgangssignals. Beides ist abhängig von der Last, die nach dem RC-Glied folgt. |
|
|
Anschluss einer DCF77-Aktivantenne Der Anschluss einer DCF77-Aktivantenne an den C-Control/plus Steuercomputer kann entweder über die dafür vorgesehene dreipolige Stiftleiste (J3) oder über einen Spezialport an einer der beiden Buchsenleisten erfolgen. Die dreipolige Stiftleiste stellt die Spannungsversorgung für die Aktivantenne zur Verfügungung (5V, GND) und empfängt die Signalimpulse von der Antenne (DCF77). Die Antenne
muss dazu über einen Open-Collector-Ausgang nach Masse verfügen, der durch das empfangene Signal geschaltet wird (low-getastet). Zum
Anschluss der Aktivantenne ist unbedingt abgeschirmtes Kabel zu verwenden, da sonst besonders bei größeren Kabellängen Störimpulse eingestrahlt werden können. |
|
|
Beschaltung der Systemsignalports Neben den Analog- und Digitalports stehen an den zwei Buchsenleisten die Systemsignale der Bedien- und Anzeigeelemente zur Verfügung. So können auch externe Baugruppen rückgesetzt und gestartet werden oder das Rücksetzen und das Starten auslösen oder die LED-Signale für weitere Anzeigen oder für Synchronisationszwecke benutzt werden. Alle Signale sind low-aktiv. |
|
|
Systemressourcen Unter dem Begriff „Systemressourcen" sind hier alle internen Funktionseinheiten zusammengefasst, die sich nicht unmittelbar aus den Eigenschaften des Mikrocontrollers ableiten, sondern durch das auf dem Chip maskenprogrammierte Betriebssystem zur Verfügung gestellt werden. Wie diese Systemressourcen im Programm angesprochen werden, wird weiter unten in der Beschreibung des Blockvorrates erläutert. |
|
|
Timer Im Hintergrund des Betriebssystems läuft ein mit 20 Millisekunden getakteter 16-Bit-Timer, dessen Wert jederzeit ausgelesen und zum Herstellen von Zeitbezügen im Programm benutzt werden kann. |
|
|
Echtzeituhr Die per DCF77 empfangene Zeit- und Datumsinformation wird vom Betriebssystem in sieben interne Speicherzellen (Jahr, Monat, Tag, Wochentag, Stunde, Minute, Sekunde) übertragen und bis zur nächsten Synchronisation in Portionen von 20 Millisekunden erhöht. Die Ganggenauigkeit der Echtzeituhr zwischen den Synchronisationszeitpunkten ist bestimmt durch die Abweichung des 4MHz-Quarzes von seiner Normalfrequenz um bis zu 0,1 Promille, abhängig von Streuungen in der Serienproduktion und von der Temperatur. Das entspricht einer Abweichung von bis zu 0,36 Sekunden pro Stunde. |
|
|
Userbytes
Der Mikrocontroller MC68HC05B6 verfügt über insgesamt 240 Bytes RAM. Der C-Control Steuercomputer belegt davon größten Teil für Betriebssystemfunktionen (Stack, Timer, Uhr, DCF77-Rahmenpuffer, Schnittstellenpuffer, Zwischenspeicher für Berechnungen usw.). 24 Bytes stehen dem Anwender zur Verwendung in seinen Programmen zur Verfügung. Die Verwendung dieser Userbytes wird weiter unten in der Beschreibung des Blockvorrates erläutert. |
|
|
Datei
Die Datei ist der Bereich des EEPROMs nach dem Anwenderprogramm, der zur Aufzeichnung von Daten (z.B. Meßwerte oder Programmparameter) benutzt werden kann. |
| 5. Erste Inbetriebnahme - Schritt für Schritt |
|
|
|
|
|
Software-Installation - Die Anweisungen zur Installation der Software entnehmen Sie bitte der Datei INSTALL.TXT. |
|
Bereitstellen einer Spannungsversorgung Stellen Sie eine 5-Volt-Gleichspannungsversorgung (bzw. 8...12 Volt beim Betrieb des Systems mit Starter Board oder Application Board) mit zwei abisolierten Kabelenden zur Verfügung. Prüfen Sie bitte, welches der beiden Kabelenden Masse („Minus") und welches spannungsführend („Plus") ist. Schalten Sie die Spannungsversorgung aus und klemmen Sie die Kabelenden an der zweipoligen Schraubklemme (J8) des Steuercomputers (bzw. J5 des Starter Boards) polungsrichtig an. Beachten Sie dabei bitte den Anschlussplan im Abschnitt Aufbau und Funktionsweise und die Polungshinweise (+, -) auf der Platine. |
|
|
Verbinden des Steuercomputers mit dem PC Mit dem Gerät wurden Ihnen zwei Schnittstellenkabel ausgeliefert: ein 9-poliges Nullmodemkabel (ca. 1,5 Meter) und ein Adapterkabel (ca. 30 cm). Stecken Sie Sie nun das Nullmodemkabel an eine freie serielle Schnittstelle Ihres Computers. Viele Computer verfügen über eine 9-poligen und eine 25-polige serielle Schnittstelle. Sollte bei Ihrem Computer nur noch eine 25-polige Schnittstelle frei sein, benötigen Sie einen zusätzlichen Adapter. |
|
| Website von MAX Deutschland |
| 6. Programmierung |
|
|
|
|
|
Was ist ein „Programm"? Ein Programm ist die Beschreibung eines Informationsverarbeitungsprozesses. Im Laufe eines solchen Prozesses wird aus einer Menge von variablen oder konstanten Eingangswerten eine Menge von Ausgangswerten berechnet. Die Ausgangswerte sind entweder selbst Ziel der Informationsgewinnung oder dienen mittelbar zur Reaktion auf die Eingangswerte. Neben den eigentlichen Berechnungen kann ein Programm Anweisungen zum Zugriff auf die Hardware des Computers oder zur Steuerung des Programmflusses enthalten.
|
|
|
|
| C-Control I/BASIC-Progrmmierung | |
| C-Control I/Assembler-Progrmmierung |
| 7. Programmbeispiele |
|
|
|
|
|
Was ist ein „Programm"? Ein Programm ist die Beschreibung eines Informationsverarbeitungsprozesses. Im Laufe eines solchen Prozesses wird aus einer Menge von variablen oder konstanten Eingangswerten eine Menge von Ausgangswerten berechnet. Die Ausgangswerte sind entweder selbst Ziel der Informationsgewinnung oder dienen mittelbar zur Reaktion auf die Eingangswerte. Neben den eigentlichen Berechnungen kann ein Programm Anweisungen zum Zugriff auf die Hardware des Computers oder zur Steuerung des Programmflusses enthalten.
|
|
zur Hauptseite |
© Samuel-von-Pufendorf-Gymnasium Flöha | © Frank Rost am 13. März 2005 |
|
... dieser Text wurde nach den Regeln irgendeiner Rechtschreibreform verfasst - ich hab' irgendwann einmal beschlossen, an diesem Zirkus nicht mehr teilzunehmen ;-) „Dieses Land braucht eine Steuerreform, dieses Land braucht eine Rentenreform - wir schreiben Schiffahrt mit drei „f“!“ Diddi Hallervorden, dt. Komiker und Kabarettist |


{kind=link}